Microrrobôs controlados individualmente com campos de força
Redação do Site Inovação Tecnológica - 28/01/2016
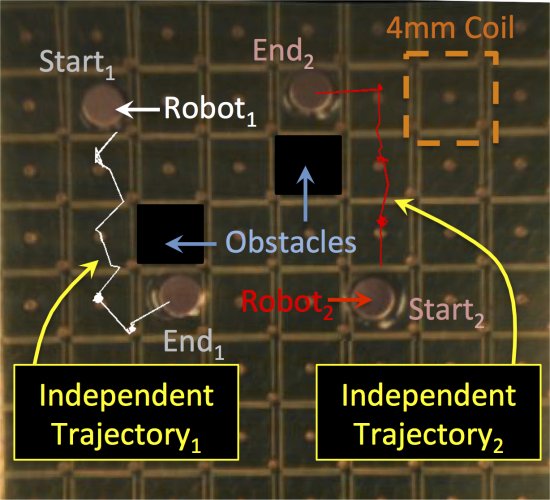
[Imagem: Purdue University/David Cappelleri]
Controle independente
Uma tecnologia de "mini-campos de força" foi usada para alimentar e controlar microrrobôs individuais de forma independente.
O mais comum nesse campo tem sido construir enxames robóticos, usando microrrobôs que agem socialmente, imitando o comportamento de insetos, como abelhas e formigas.
Mas Sagar Chowdhury, da Universidade Purdue, nos EUA, queria controlar os robôs de forma individual, com vistas a utilizá-los em futuros processos de fabricação, criando máquinas minúsculas capazes de agir de forma ordenada e programada.
"A razão pela qual nós queremos movimentos independentes de cada robô é para que eles possam fazer tarefas cooperativas de manipulação. Nós queremos ser capazes de controlá-los individualmente para que possamos ter alguns robôs aqui fazendo uma coisa, e alguns robôs lá fazendo outra coisa ao mesmo tempo," explicou seu professor David Cappelleri, que coordenou o trabalho.
Robôs magnéticos
A grande novidade, portanto, está no sistema construído para controlar os robôs.
Chowdhury usou uma matriz de minúsculas bobinas planas que geram campos para criar uma espécie de tabuleiro de damas magnético, onde cada quadrado representa uma posição possível de cada microrrobô.
Os microrrobôs contêm discos magnéticos e uma superfície inferior que os permite deslizar pelo tabuleiro. No protótipo, cada robô tem cerca de 2 milímetros de diâmetro, mas a equipe pretende trabalhar com microrrobôs em torno de 250 micrômetros de diâmetro, aproximadamente o tamanho de um ácaro.
Os robôs são movidos utilizando as forças magnéticas atrativas ou repulsivas dos campos magnéticos gerados pelas bobinas. O software que controla as bobinas permite então traçar roteiros específicos para cada robô de forma independente e com movimentos simultâneos.
Campos de força
Os "campos de força" também são usados para alimentar os robôs.
"Os robôs são pequenos demais para que colocássemos pilhas neles, então eles não podem ter energia a bordo. Você precisa usar uma forma externa para alimentá-los. É como usar mini-campos de força," disse Cappelleri.
Agora que os microrrobôs já conseguem se mover de forma independente, o próximo passo será dar-lhes a capacidade para fazer algo útil - apertar parafusos ou capturar micropartículas seriam ótimos para começo de conversa para quem pretende criar "futuros esquemas de manufatura avançada".
Artigo: Towards Independent Control of Multiple Magnetic Mobile Microrobots
Autores: Sagar Chowdhury, Wuming Jing, David Cappelleri
Revista: Micromachines
Vol.: 7 (1): 3
DOI: 10.3390/mi7010003






Fábrica nanotecnológica: Nanofabricação agora em linha de produção
Sensores do tamanho de grãos de sal vão monitorar corpo humano
É possível criar uma tecnologia biológica, totalmente sustentável?
Descrição inédita sobre origem do atrito pode dispensar lubrificantes
Motor molecular gira dentro de um cristal sólido
Nanoplanetas de metal líquido prometem novos mundos para a química
Intel apresenta maior computador neuromórfico inspirado no cérebro
Monociclo com duas pernas será ideal para fazer entregas
Melhor rota para naves espaciais é traçada com teoria dos nós
Bateria de ferro totalmente líquida armazena energias renováveis
Fotografado pela primeira vez bizarro cristal formado apenas por elétrons
Criados bits quânticos que mantém dados à temperatura ambiente
Expansão do Universo pode estar desacelerando
Detectada onda gravitacional que pode ajudar a resolver mistério cósmico
Resolvido antigo mistério sobre a formação dos cristais
Único no mundo, chip que funciona com luz é lançado industrialmente
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.