Novo sensor de profundidade torna carros autônomos mais seguros
Redação do Site Inovação Tecnológica - 11/01/2018
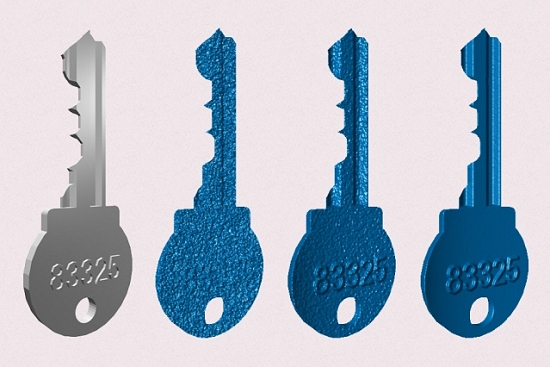
[Imagem: Achuta Kadambi/Ramesh Raskar]
Detecção de profundidade
Um dos grandes desafios técnicos para os carros sem motorista é o cálculo de profundidade, que permite que suas câmeras calculem com precisão a distância de cada objeto em particular, separando, por exemplo, uma "tartaruga" reflexiva de sinalização no meio do asfalto de uma guia no próximo cruzamento.
Achuta Kadambi e Ramesh Raskar, do MIT, nos EUA, acabam de revolucionar essa técnica de processamento de profundidade, aumentando sua resolução em nada menos do que 1.000 vezes.
Além disso, a nova abordagem promete medições de distância precisas através da neblina, o que tem-se mostrado um grande obstáculo para os carros autônomos em testes em condições reais de tráfego.
Em um alcance de 2 metros, os sistemas existentes têm uma resolução de profundidade de cerca de um centímetro, o que é bom o suficiente para os sistemas de estacionamento assistido e de detecção de colisão dos carros de hoje.
O novo sistema apresenta uma resolução de profundidade de 3 micrômetros à mesma distância de 2 metros. Em um teste de demonstração com uma chave de ignição, até os números em relevo na chave foram detectados.
Os pesquisadores realizaram ainda testes em que um sinal de luz é enviado através de 500 metros de fibra óptica, com filtros regularmente espaçados ao longo do seu comprimento para simular a degradação do sinal. Esses testes indicaram que, em uma faixa de 500 metros, o novo sistema ainda deve alcançar uma resolução de profundidade de apenas um centímetro.
Processamento em GHz
O avanço foi possível graças à utilização de uma nova forma de processamento de imagem.
Nos sistemas atuais, um pulso de luz sai do sistema, atinge o objeto e volta à câmera, e o tempo que a operação toda leva permite calcular a distância do objeto. Ocorre que, enquanto os pulsos de luz podem ser emitidos na faixa dos bilhões de vezes por segundo, os detectores só conseguem lidar com cerca de 100 milhões de medições por segundo, limitando a resolução.
Kadambi e Raskar foram então buscar inspiração na acústica. Qualquer um que tenha atuado em um conjunto musical está familiarizado com o fenômeno da "batida". Se dois cantores ficam ligeiramente fora de sintonia - um produzindo um tom em 440 hertz e o outro em 437 hertz, por exemplo - a interação de suas vozes produzirá outro tom, cuja frequência é a diferença entre as notas que eles emitem - neste caso, 3 hertz.
O mesmo acontece com os pulsos de luz. Se um sistema de imagem em tempo real estiver disparando luz para uma cena com uma taxa de um bilhão de pulsos por segundo, e a luz de retorno é combinada com outra luz pulsando 999.999.999 vezes por segundo, o resultado será a emissão de um sinal de luz pulsando uma vez por segundo - uma taxa facilmente detectável com uma câmera de vídeo convencional. E essa "batida" lenta conterá todas as informações de fase necessárias para avaliar a distância.
Coerência óptica e coerência eletrônica
Em vez de tentar sincronizar dois sinais de luz de alta frequência - o que impede, por exemplo, o uso de sistemas de interferometria nos carros, tipicamente muito mais precisos - os pesquisadores simplesmente modulam o sinal de retorno. Ou seja, eles pulsam a luz já pulsada. O resultado é o mesmo, mas a abordagem é muito mais prática para os sistemas automotivos.
"A fusão da coerência óptica e da coerência eletrônica é única,", disse Raskar. "Estamos modulando a luz a alguns poucos gigahertz, então é como ligar e desligar uma lanterna milhões de vezes por segundo. Mas estamos mudando isso eletronicamente, e não opticamente. A combinação dos dois é realmente onde você obtém o poder para este sistema."
O sistema também deverá ser naturalmente melhor para compensar a interferência causada pela neblina, que tipicamente faz com que a luz demore mais e chegue à câmera de ângulos inesperados em comparação com uma cena com ar limpo.
Artigo: Rethinking Machine Vision Time of Flight With GHz Heterodyning
Autores: Achuta Kadambi, Ramesh Raskar
Revista: IEEE Access
DOI: 10.1109/ACCESS.2017.2775138




Máquina de pistão permitirá gerar eletricidade a partir de calor residual
Ataque faz radares de carros autônomos alucinarem
Adeus radar: Câmera mede velocidade dos veículos trafegando na via
Peças de carros começam a ser feitas de biopolímeros reforçados com fibra
Material multifuncional armazena energia na lataria de carros e eletrônicos
Arranjos Produtivos Locais promovem inovação em empresas de todos os portes
Bateria de ferro totalmente líquida armazena energias renováveis
Quando as coisas derretem? Problema de física com mais de 100 anos é resolvido
Expansão do Universo pode estar desacelerando
Expansão do Universo é descrita com conceitos da termodinâmica
Descoberta primeira molécula fractal da natureza
Detectada onda gravitacional que pode ajudar a resolver mistério cósmico
Descoberto novo material para célula solar de alto desempenho
Resolvido antigo mistério sobre a formação dos cristais
Levitação magnética poderá viabilizar tecnologias antigravitacionais?
Detectado sinal similar ao gráviton, a tão procurada partícula da gravidade
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.