Olhar de gafanhoto evita que você bata o carro
Redação do Site Inovação Tecnológica - 12/03/2013

[Imagem: Yue/Rind/IJAMS]
O paradigma básico das pesquisas em visão artificial consiste em coletar imagens com câmeras e processar os arquivos digitais resultantes com algoritmos de reconhecimento de padrões.
Como essa técnica tem limitações muito claras, os pesquisadores estão partindo para copiar - ou pelo menos imitar - o sistema visual de animais.
Os gafanhotos foram os escolhidos de uma equipe multi-institucional europeia, liderada por Shigang Yue (Universidade Lincoln) e Claire Rind (Universidade de Newcastle).
Segundo eles, o funcionamento do sistema visual único dos gafanhotos pode ser transferido para tecnologias que incluem sensores para evitar colisões entre veículos, inspeção de linhas de produção, vigilância, videogames e navegação de robôs.
Os gafanhotos possuem uma forma de processamento das informações visuais extremamente rápida. Usando sinais elétricos e químicos, esses insetos conseguem evitar os choques uns com os outros e, como voam baixo, evitam igualmente chocar-se com obstáculos no solo.
Segundos os pesquisadores, esse sistema de processamento incorporado na própria biologia do animal pode ser recriado por meio de equipamentos e softwares adequados, e então incorporado em robôs e outros equipamentos.
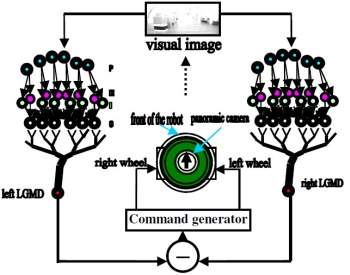
Para isso, eles criaram um "controle motor visualmente estimulado", um dispositivo formado por dois tipos de detectores de movimento e um gerador de comandos motores.
Cada detector processa as imagens e extrai informações relevantes que são então convertidas em comandos motores - desviar de um obstáculo, por exemplo.
[Imagem: Yue/Rind/IJAMS]
"Nós criamos um sistema inspirado nos interneurônios sensitivos do movimento do gafanhoto. Este sistema foi então usado em um robô para permitir que ele explore caminhos ou interaja com objetos, usando unicamente as informações visuais," explicou o Dr. Yue.
Os robôs normalmente fazem isto usando sensores de infravermelho e radares.
Esta foi a apenas a primeira demonstração do projeto. Os pesquisadores já dispõem de financiamento da União Europeia pelos próximos quatro anos, quando pretendem que o sistema esteja pronto para ser incorporado em sistemas anticolisão para carros.
"Esta pesquisa demonstra que a modelagem de sistemas neurais visuais artificiais biologicamente plausíveis pode trazer novas soluções para a visão computadorizada em ambientes dinâmicos. Por exemplo, isto pode ser usado para permitir que veículos entendam o que está acontecendo à frente e tomar ações adequadas," disse Yue.
Artigo: Visually stimulated motor control for a robot with a pair of LGMD visual neural networks
Autores: Shigang Yue, F. Claire Rind
Revista: International Journal of Advanced Mechatronic Systems
Vol.: 4, No.5/6 - pp.237 - 247
DOI: 10.1504/IJAMECHS.2012.052219






Metassuperfícies giratórias criam câmera térmica compacta
Lente plana usa aprendizado de máquina para ver com mais clareza
Olho metamórfico dará a robôs visão de olhos compostos, como os insetos
IA na indústria revoluciona controle de qualidade
Sensor neuromórfico reconhece e prevê movimento em um único quadro
Uma visão artificial que faz tudo: Vê, processa e armazena
Bateria de ferro totalmente líquida armazena energias renováveis
Criados bits quânticos que mantém dados à temperatura ambiente
Quando as coisas derretem? Problema de física com mais de 100 anos é resolvido
Expansão do Universo pode estar desacelerando
Fotografado pela primeira vez bizarro cristal formado apenas por elétrons
Expansão do Universo é descrita com conceitos da termodinâmica
Detectada onda gravitacional que pode ajudar a resolver mistério cósmico
Descoberto novo material para célula solar de alto desempenho
Detectado sinal similar ao gráviton, a tão procurada partícula da gravidade
Resolvido antigo mistério sobre a formação dos cristais
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.