Olho eletrônico combina lente plana com músculo artificial
Redação do Site Inovação Tecnológica - 16/03/2018
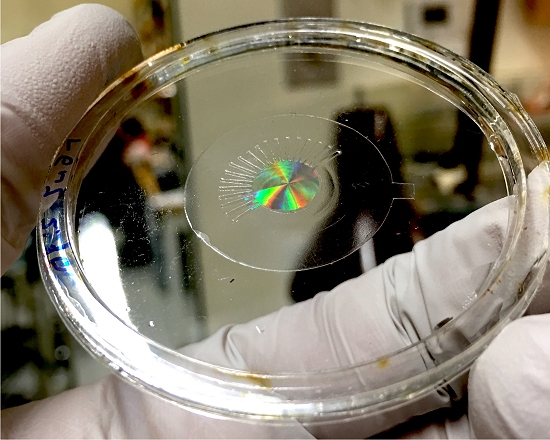
[Imagem: Harvard SEAS]
Olho eletrônico
Inspirando-se no olho humano, uma equipe multidisciplinar da Universidade de Harvard, nos EUA, combinou uma lente plana com um músculo artificial.
Embora seja um dispositivo básico e ainda rudimentar em comparação com o olho humano, o protótipo é uma demonstração de conceito de um olho artificial controlado eletronicamente.
"Esta pesquisa combina avanços na tecnologia dos músculos artificiais com a tecnologia de metalentes para criar uma metalente ajustável que pode mudar seu foco em tempo real, assim como o olho humano," disse o pesquisador Alan She.
"Fomos um passo além rumo ao desenvolvimento da capacidade de corrigir dinamicamente aberrações como o astigmatismo e o deslocamento da imagem, que o olho humano não consegue fazer naturalmente," acrescentou.
Metalente com músculo artificial
As metalentes são superfícies planas dotadas de nanoestruturas projetadas com precisão para focar a luz de uma determinada maneira - elas são construídas com a mesma tecnologia dos metamateriais e das metassuperfícies.
Enquanto as metalentes feitas até agora eram minúsculas, a equipe já consegue fabricar protótipos até na faixa dos centímetros. Para isso, eles tiveram que desenvolver um algoritmo que comprime a quantidade de dados envolvidos no projeto das nanoestruturas que manipulam a luz.
"Como as nanoestruturas são minúsculas, a densidade de informações em cada lente é incrivelmente alta," explicou She. "Se você passar de uma lente de 100 micrômetros para uma lente na faixa dos centímetros, você aumenta a informação necessária para descrever a lente por 10.000. Sempre que tentamos aumentar a lente, só o arquivo do projeto salta para a casa dos gigabytes ou mesmo terabytes."
No olho humano, a lente - o cristalino - é circundada pelo músculo ciliar, que estica ou comprime a lente, alterando seu formato para ajustar sua distância focal. No dispositivo robótico, esse músculo foi substituído por um elastômero dielétrico transparente que tem como propriedade óptica a capacidade de fazer com que a luz viaje com baixo nível de perda, para não interferir com a imagem.
O músculo artificial de elastômero é controlado eletricamente. À medida que ele se estende, os nanopilares se deslocam na superfície da metalente, alterando a forma como a lente inteira foca a luz. A metalente pode ser ajustada controlando tanto a posição dos pilares em relação aos vizinhos quanto o deslocamento total das nanoestruturas.
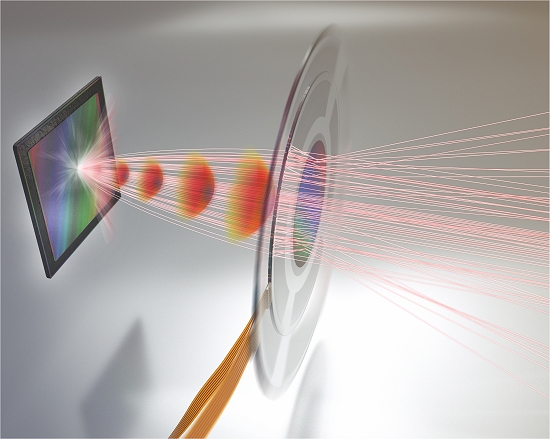
[Imagem: Second Bay Studios/Harvard SEAS]
Uso eletrônico
Os testes mostraram que esse olho artificial primitivo consegue simultaneamente focar a luz, controlar aberrações causadas por astigmatismos, bem como executar deslocamentos da imagem.
Embora seja um conceito promissor para óculos e lentes de contato inteligentes no futuro, essa tecnologia deverá encontrar aplicações mais prontamente em aparelhos eletrônicos, como câmeras, e em microscópios e telescópios.
Artigo: Adaptive metalenses with simultaneous electrical control of focal length, astigmatism, and shift
Autores: Alan She, Shuyan Zhang, Samuel Shian, David R. Clarke, Federico Capasso
Revista: Science Advances
Vol.: 4: eaap9957
DOI: 10.1126/sciadv.aap9957
Artigo: Large area metalenses: design, characterization, and mass manufacturing
Autores: Alan She, Shuyan Zhang, Samuel Shian, David R. Clarke, Federico Capasso
Revista: Optics Express
Vol.: 26, Issue 2, pp. 1573-1585
DOI: 10.1364/OE.26.001573





Metafluidos: Vêm aí os líquidos inteligentes
Madeira interativa entende e informa tudo o que acontece sobre ela
Você não precisa de cola para unir materiais - eletricidade basta
Lançada tecnologia de código aberto para interface com neurônios vivos
Células vivas são controladas eletronicamente em tempo real
Olhos de insetos ajustáveis e duráveis feitos com lentes microscópicas
Reator de fusão nuclear supera dois obstáculos operacionais importantes
Descoberto maior buraco negro estelar da Via Láctea
Descobertas evidências mais antigas do campo magnético da Terra
Oureno: Criado um "grafeno de ouro"
Revolucionário: Luz gera magnetismo em material isolante
Célula solar atinge 190% de eficiência quântica
Metafluidos: Vêm aí os líquidos inteligentes
Criados bits quânticos que mantém dados à temperatura ambiente
Melhor rota para naves espaciais é traçada com teoria dos nós
Intel apresenta maior computador neuromórfico inspirado no cérebro
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.