Conheça o microrrobô industrial mais rápido do mundo
Redação do Site Inovação Tecnológica - 27/09/2022
[Imagem: Université de Franche-Comté]
Microrrobô industrial
Engenheiros franceses apresentaram o que eles garantem ser o robô industrial mais rápido do mundo - além de ser um dos menores robôs industriais já fabricados.
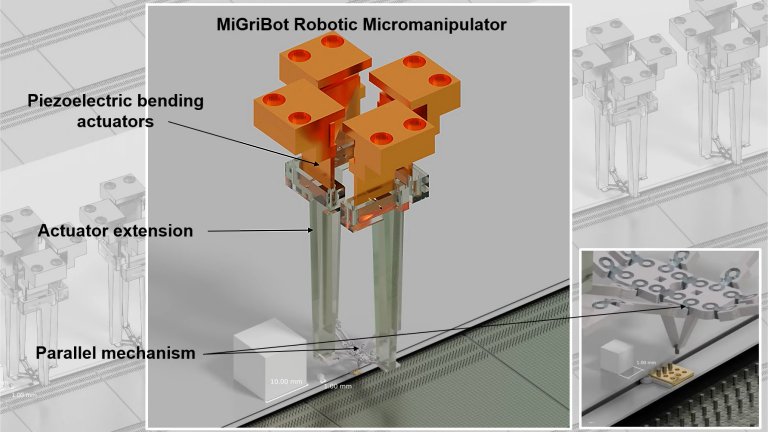
Ao contrário dos tradicionais braços robóticos vistos em fábricas, que são equipamentos grandes e pesados, o MiGriBot nasceu talhado para as indústrias onde a miniaturização é essencial, como na microeletrônica.
O MiGriBot - seu nome é uma sigla em inglês para "garra robótica miniaturizada" - consegue agarrar e mover um micro-objeto quase 720 vezes por minuto, ou 12 operações por segundo.
Além disso, ele opera com uma precisão da ordem do micrômetro, ou um milionésimo de metro, o que é essencial para colocar os componentes eletrônicos de um aparelho miniaturizado sempre no lugar certo - a placa de circuito impresso de um telefone celular, por exemplo, tem mais 500 componentes, todos minúsculos.
"As técnicas atualmente usadas na mecânica de robôs são caras e há muito espaço para progresso em termos de tempo e precisão," explicou Redwan Dahmouche, da Universidade do Franco-Condado. "A Universidade de Harvard apresentou o MiniDelta em 2018, mas ele não conseguia agarrar um objeto. Em 2020, a Universidade de Tóquio conseguiu essa façanha, mas seu robô só conseguia realizar 72 operações por minuto. O desafio era, portanto, trabalhar nesses critérios, para ter um robô compacto, rápido e preciso."
Para conseguir seu intento, os pesquisadores franceses primeiro tiveram que encontrar os componentes mais adequados. Os braços mecânicos excepcionalmente flexíveis do robô são feitos de polidimetilsiloxano, um composto químico que também está presente em óleos e algumas borrachas.
Dependendo da densidade do material, esse polímero pode assumir diferentes formas, desde um microfluido orgânico até uma textura semelhante à goma. Essa elasticidade ajudou a deixar a estrutura mais leve, acelerando a velocidade no manuseio dos objetos.
No entanto, velocidade e precisão não são apenas uma questão de material, então foi necessário projetar também uma estrutura melhor - uma arquitetura "paralela".
Arquitetura paralela
Robôs de grande e médio porte (de algumas dezenas de centímetros a vários metros), assim como os microrrobôs utilizados na indústria, geralmente são construídos de acordo com uma arquitetura serial: Todos os elementos que compõem os braços mecânicos são montados em série. Cada elemento (incluindo os atuadores ou micromotores) é colocado um após o outro, o que limita consideravelmente a velocidade de ação do dispositivo.
Neste caso, o robô foi construído usando o que é conhecido como arquitetura paralela: "Em geral, os robôs combinam múltiplos sistemas. Por exemplo, a garra é sempre adicionada de forma independente, representando um elo separado dentro da cadeia geral. Mas aqui todos os elementos formam parte integral do mesmo sistema," explicou Dahmouche.
Assim, os atuadores do MiGriBot estão todos conectados à base do robô, o que permite que as articulações respondam muito mais rapidamente, permitindo uma melhor coordenação entre as diferentes partes. "O que há de original neste robô é a sua arquitetura, que redesenhamos inteiramente com o objetivo de aplicar as especificações nesta escala," acrescentou o pesquisador.
Outra vantagem é que a arquitetura integrada e miniaturizada permite a fabricação do robô usando as linhas de montagem microeletrônicas tradicionais, abrindo a possibilidade de produzir dezenas e até milhares de MiGriBots para uso em uma linha de montagem.
"Eventualmente gostaríamos de produzir microfábricas que possam montar as estruturas mais complexas da microeletrônica. Não é apenas uma questão de rentabilidade: A possibilidade de ter milhares de microrrobôs em um mesmo metro quadrado, realizando milhões de operações por minuto, reduziria consideravelmente o consumo de energia nos processos de fabricação," completou Dahmouche.






Gerador produz eletricidade usando somente o calor da sua pele
Memória de luz traz avanço multinível para computação óptica
Revolução na radioastronomia: Ondas de rádio geram imagens 3D
Coprocessador metatrônico resolve equações na velocidade da luz
Entrelaçamento quântico entre partículas não é instantâneo
Eletrônica sem semicondutores e feita em casa? É possível
Técnica para remover micro e nanoplásticos da água é criada por brasileiros
RRAMs, as memórias que fazem cálculos, mais próximas de mudar a computação
Profundoscópio, o microscópio que promete revolucionar a neurociência
Baterias de zinco superam a casa dos 100 mil ciclos
Atuador robótico supera capacidades do pulso humano
Robô-caracol inspecionará edifícios e pás de turbinas eólicas
Garra robótica macia de 130g levanta 100kg de carga
Enxame de pequenos veículos transporta até 40 toneladas
ChatGPT projeta robô colhedor de tomates que funciona de verdade
Robôs devem ter direitos? Confucionismo tem alternativa melhor
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.