Robô movido a corda e com transmissão variável
Redação do Site Inovação Tecnológica - 11/11/2016
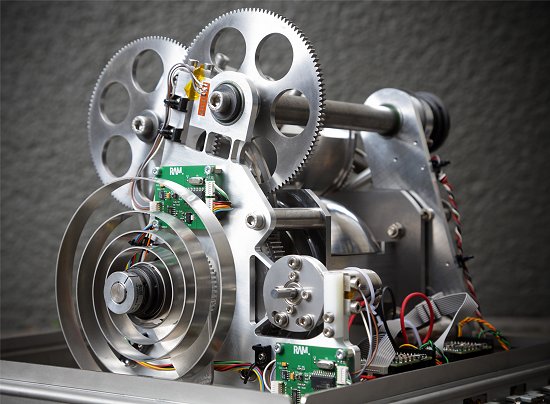
[Imagem: Universidade Twente]
Robô mecânico
Por muito tempo, relógios e brinquedos moviam-se impulsionados não por baterias, mas por corda: você girava uma pequena borboleta que enrolava uma mola concêntrica; a mola ia então se desenrolando lentamente, fazendo o relógio funcionar ou o brinquedo andar.
Douwe Dresscher, da Universidade de Twente, na Holanda, constatou agora que os robôs podem ter um grande ganho se usarem um mecanismo similar - na verdade, um híbrido entre uma mola de relógio tamanho família e um sistema de transmissão variável, como o usado em alguns modelos de automóveis para eliminar a necessidade de troca de marchas.
O objetivo de Dresscher é reduzir o consumo de energia, permitindo que um robô funcione sem qualquer assistência ou manutenção por um período significativamente maior do que seria possível usando apenas baterias.
Ele está projetando robôs que inspecionem diques, barragens e outras estruturas importantes para que o mar não invada vastas áreas de seu país. Para isso, os robôs devem operar de forma autônoma de seis a oito horas por dia.
Atuação Passiva Controlada
A solução encontrada pelo engenheiro foi desenvolver um sistema mecânico de carregamento de energia e introduzir uma caixa de câmbio similar à tradicional variomatic, a primeira caixa de câmbio automotiva totalmente automática e variável, que foi inventada nos anos 1950 pelo também holandês Hub van Doorne. A diferença é que, em lugar das correias usadas no variomatic, foram usados dois hemisférios metálicos para fazer a transmissão de força.
Para andar pelos diques e barragens sem escorregar, Dresscher constatou que robôs com pernas são a melhor opção - melhor do que esteiras, que podem danificar as estruturas quando o robô vira. Além disso, a oferta e a demanda de energia estão em equilíbrio em um robô com pernas - o problema é que seus motores elétricos consomem muita energia.
O suprimento mecânico de energia resolve o problema permitindo que os motores elétricos trabalhem em seu regime ótimo, e a energia mecânica pode ser reutilizada, com o robô essencialmente devolvendo um pouco de sua corda - é o que o engenheiro chamou de "Atuação Passiva Controlada".
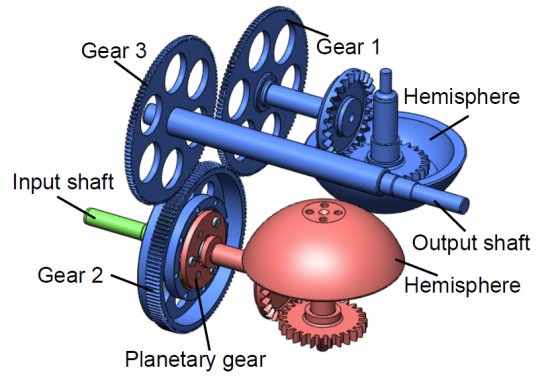
[Imagem: Universidade Twente]
Robô com câmbio variável
O sistema armazena energia mecânica na mola, enquanto a caixa de câmbio mantém a transmissão em um nível ideal, mantendo os dois meio-hemisférios girando e constantemente em contato. Seu ângulo de contato muda quando o torque muda, o que resulta em um outro raio relativo. A diferença entre os raios efetivos determina a relação de transferência e a melhor carga mecânica.
Os motores elétricos entram em ação apenas para compensar perdas mecânicas, e o fazem apenas em uma condição de alta rotação e baixo torque, drenando menos energia das baterias.
Com tudo funcionando como projetado, o passo seguinte será miniaturizar o robô. E, para não fazer concessões na eficiência alcançada no movimento, Dresscher pretende adicionar sistemas de colheita de energia - solar ou eólica - para alimentar os sistemas de comunicação entre o robô e a base.






Monociclo com duas pernas será ideal para fazer entregas
Metamaterial Mecânico Digital controla forma e propriedades em tempo real
Células vivas são controladas eletronicamente em tempo real
É possível criar uma tecnologia biológica, totalmente sustentável?
Módulos lógicos pneumáticos substituem controle eletrônico de robôs
Músculos artificiais - mais leves, mais seguros e mais robustos
Inovação matemática melhora muito detecção de terremotos
Melhor rota para naves espaciais é traçada com teoria dos nós
Monociclo com duas pernas será ideal para fazer entregas
Bateria de ferro totalmente líquida armazena energias renováveis
Fotografado pela primeira vez bizarro cristal formado apenas por elétrons
Criados bits quânticos que mantém dados à temperatura ambiente
Expansão do Universo pode estar desacelerando
Detectada onda gravitacional que pode ajudar a resolver mistério cósmico
Resolvido antigo mistério sobre a formação dos cristais
Único no mundo, chip que funciona com luz é lançado industrialmente
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.