Das calçadas para a robótica: Bonecos infláveis inspiram robôs sem cérebro
Redação do Site Inovação Tecnológica - 14/05/2025

[Imagem: AMOLF/Alberto Comoretto]
Robôs birutas
Os bonecos birutas infláveis passaram de curiosidades divertidas para um recurso de propaganda profissional, e agora eles deram um passo rumo à alta tecnologia.
Alberto Comoretto e colegas do Instituto Amolf, nos Países Baixos, usaram o mesmo princípio dos bonecos balançantes para criar um robô que anda, salta e até nada, tudo sem cérebro, eletrônica ou inteligência artificial - apenas tubos flexíveis, ar e um pouco de física básica bem explorada.
É um dos robôs macios mais rápidos já criados, e um dos mais simples.
Ele não possui microcontrolador, nem software e nem mesmo sensores. E ainda assim, ele se move com coordenação e autonomia surpreendentes, simplesmente por causa da estrutura do seu corpo e do modo como ele interage com o ambiente.
Ou seja, a mesma física que faz os bonecos birutas se mexerem e dançarem tornou-se a chave para criar uma nova família de robôs autônomos e muito versáteis - não são muitos os robôs que conseguem andar e nadar sem precisar de qualquer alteração, por exemplo.
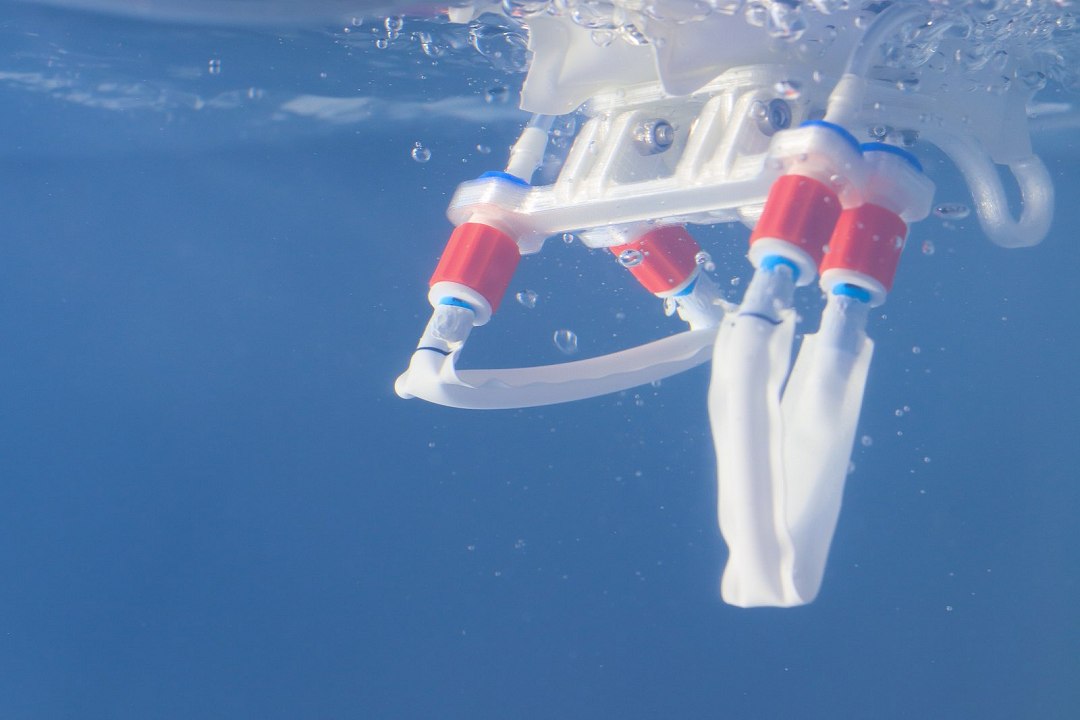
[Imagem: AMOLF/Alberto Comoretto]
Movimento sincronizado autônomo
As pernas do robô são feitas de tubos ocos macios. Impulsionadas apenas por um fluxo contínuo de ar, cada uma delas começa a oscilar, como os bonecos infláveis na calçada - o fluxo de ar é embarcado, ou seja, gerado no corpo do próprio robô, o que significa que ele é autônomo.
Sozinha, cada perna balança aleatoriamente. Mas quando muitas delas são acopladas de modo bem planejado, começa a acontecer algo interessante: Seus movimentos se sincronizam rapidamente, assumindo movimentos rítmicos que se prestam muito bem à locomoção.
"De repente, a ordem emerge do caos," disse Comoretto. "Não há código, nem instruções. As pernas simplesmente entram em sincronia espontaneamente, e o robô decola. Assim como vaga-lumes piscando em sincronia ou células cardíacas pulsando em uníssono, movimentos coletivos complexos surgem de interações simples."
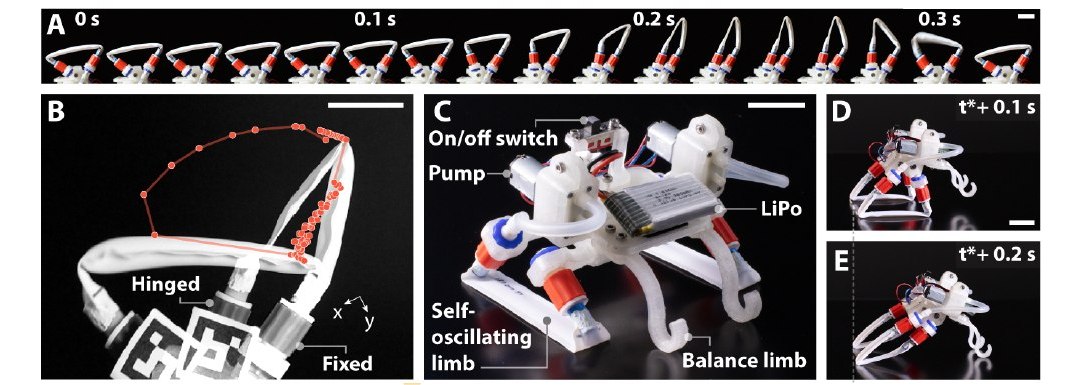
[Imagem: Alberto Comoretto et al. - 10.1126/science.adr3661]
Mais rápido que Ferrari
Outra característica inesperada do robô é a velocidade. Quando o fluxo de ar é ligado, o robô atinge uma velocidade de caminhada de 30 comprimentos de corpo por segundo.
Quer uma comparação? Uma Ferrari atinge apenas 20 comprimentos de corpo por segundo. Ou seja, a velocidade do robô é ordens de magnitude mais rápida do que a de outros robôs movidos a ar, que ainda exigem um controle computadorizado à parte do próprio robô.
E não para por aí: A sincronização é adaptativa. Se o robô encontrar um obstáculo, ele se reorienta. Ao se mover da terra para a água, por exemplo, o ritmo da marcha muda espontaneamente de um padrão de salto em fase para um nado livre. Essas transições ocorrem sem nenhum processador central ou lógica de controle: O movimento emerge do forte acoplamento entre o corpo do robô e o ambiente, sem a necessidade de qualquer sensor que detecte a presença de água ou do ar.
"Na biologia, frequentemente vemos uma inteligência descentralizada similar," disse Mannus Schomaker, membro da equipe. "Estrelas-do-mar, por exemplo, coordenam centenas de pés tubulares usando retroalimentação local e dinâmica corporal, não um cérebro centralizado."

[Imagem: Alberto Comoretto et al. - 10.1126/science.adr3661]
Máquina com múltiplas aplicações
Esta demonstração desafia a ideia convencional de que robôs precisam de sistemas de controle complexos para realizar comportamentos complexos ou realistas.
"Objetos simples, como tubos, podem dar origem a comportamentos complexos e funcionais, desde que entendamos como aproveitar a física subjacente," disse o professor Bas Overvelde, coordenador da equipe. Na verdade, o próprio pesquisador prefere não chamar a criação de sua equipe de robô. "Não há cérebro, nem computador. Essencialmente, é uma máquina. Mas, quando projetada corretamente, pode superar muitos sistemas robóticos e se comportar como uma criatura artificial," disse Overvelde.
Mas os pesquisadores esperam que seu trabalho inspire novas formas de pensar o projeto robótico: Sistemas mais simples, mais adaptáveis e robustos, não por meio da computação e da IA, mas da física.
Aplicações possíveis não faltam, de pílulas inteligentes à tecnologia espacial. Microrrobôs seguros sem microeletrônica, que possam ser engolidos e liberar medicamentos após atingirem o tecido-alvo de forma autônoma, exoesqueletos robóticos vestíveis, que se sincronizam com os passos da caminhada sem processadores, reduzindo o consumo de energia e aumentando a força humana, pertencem ao primeiro grupo. Mas também podem ser máquinas mecânicas autônomas, adequadas para ambientes extremos como o espaço, onde a eletrônica tradicional pode falhar devido às variações extremas de temperatura e aos altos níveis de radiação.
Artigo: Physical synchronization of soft self-oscillating limbs for fast and autonomous locomotion
Autores: Alberto Comoretto, Harmannus A. H. Schomaker, Johannes T. B. Overvelde
Revista: Science
Vol.: 388, Issue 6747 pp. 610-615
DOI: 10.1126/science.adr3661





Processador fotônico de 192 dimensões faz computação massivamente paralela
Avanço na computação clássica coloca em xeque conceito de supremacia quântica
Propriedade inusitada do arroz cria material inteligente anti-impacto
Cristais de espaço-tempo podem criar buracos negros microscópicos
Matemáticos provam que energia escura é um erro de interpretação
Luz funciona como freio, imitando um atrito físico
Reator solar recicla plástico e produz hidrogênio limpo
Luz faz metais vibrarem 1 trilhão de vezes por segundo
Suas telas vão ver você graças a um novo tipo de píxel
Computação quântica hiperdimensional é 500 vezes mais rápida
Pássaro robótico ajuda a desvendar mistérios da turbulência em voo
Nanorrobô imita foguete espacial, com módulos de propulsão e carga reutilizáveis
Robô omnidirecional aproxima-se da eficiência máxima possível
Tatus inspiram tecnologia para proteção de máquinas delicadas
Sensor de luz para robôs médicos surpreende e irá para indústria e automação
Músculo artificial inteligente integra sensibilidade e movimento
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.