Brasil ganha infra-estrutura para operação de robôs a distância
Fábio de Castro - Agência Fapesp - 08/08/2008
Pesquisadores de diversas instituições brasileiras desenvolveram e testaram uma infra-estrutura de rede para laboratórios que permite a operação de robôs a distância e a execução remota de experimentos sofisticados por meio da internet. O projeto, segundo os autores, poderá se transformar em uma importante ferramenta para o ensino de robótica.
Laboratório de acesso remoto
O projeto do WebLab de robótica móvel foi realizado no âmbito do projeto Laboratório de Acesso Remoto (REALabs) e reúne pesquisadores do Centro de Tecnologia da Informação Renato Archer (CTI), da Unicamp, do ITA, da PUC do Rio Grande do Sul (PUC-RS) e da Universidade Federal de Uberlândia (UFU).
De acordo com Eliane Guimarães, da Divisão de Robótica e Visão Computacional do CTI, o WebLab permite a execução remota de experimentos como mapeamento do ambiente e navegação por visão, sonar ou laser e navegação e localização simultâneas, além de outros experimentos robóticos.
Controle de robôs à distância com Java
"Utilizando uma série de serviços, acessíveis a partir da linguagem de programação Java e que permitem monitorar e atuar sobre os robôs, os alunos podem desenvolver uma vasta gama de experimentos em robótica móvel e avaliá-los em ambientes simulados antes de colocá-los em ação", disse Eliane à Agência FAPESP.
Pesquisadores de instituições localizadas em outras cidades podem fazer experimentos com robôs móveis, interagindo e acessando dados coletados por eles. Segundo ela, uma vez que os algoritmos são validados em ambiente simulado, os alunos podem submetê-los para execução no ambiente real propiciado pelo WebLab.
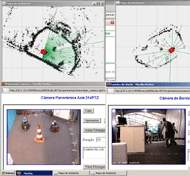
Interface de teleoperação
"A execução do algoritmo é acompanhada por interface de teleoperação que permite ao aluno visualizar o experimento por meio de vídeo em tempo real, além de operar manualmente o equipamento, caso necessário. A utilidade didática é muito grande", afirmou Eliane.
O REALabs tem o objetivo de desenvolver uma federação de WebLabs sobre a rede KyaTera - projeto cooperativo da FAPESP para o estudo de tecnologias da internet avançada apoiado por uma rede de fibras ópticas que interliga os laboratórios participantes, ligado ao Programa Tecnologia da Informação no Desenvolvimento da Internet Avançada (Tidia).
"Desde 1997 alguns participantes do projeto têm desenvolvido infra-estruturas de software para WebLabs de forma independente. O objetivo do REALabs é integrar esses esforços utilizando a rede KyaTera", disse.
Robôs móveis
Eleri Cardozo, professor titular da Feec, conta que o WebLab de robótica móvel foi testado em julho, durante a 60ª Reunião Anual da Sociedade Brasileira para o Progresso da Ciência (SBPC), realizada em Campinas (SP).
"No estande do CTI foi montado um ambiente de navegação para robôs móveis e ali foram dispostas duas câmeras panorâmicas de alta resolução, com infra-estrutura de rede composta de ponto de acesso sem fio, servidor e roteador. O ambiente incluía tamtém dois robôs móveis equipados com câmeras de bordo, sonares e sensor a laser. O acesso do WebLab foi feito a partir dos estandes do CTI e da FAPESP", disse Cardozo à Agência FAPESP
Utilizando as câmeras disponíveis no ambiente e nos robôs, os alunos puderam obter imagens e gravar vídeo para fins de documentação do experimento.
WebLab de robótica móvel
"O WebLab permite ainda o acesso em grupo, disponibilizando, para esses casos, uma interface de chat e passagem de permissão para controle de concorrência no acesso aos equipamentos", disse o pesquisador.
Segundo ele, o experimento apresentado na reunião da SBPC foi uma demonstração da versão atual dos WebLabs que vêm sendo desenvolvidos desde 1997. "Nesse caso, usamos bastante as tecnologias de internet, de forma que o navegador do usuário tem um papel importante para o acesso. O WebLab de robótica móvel foi testado pela primeira vez na rede KyaTera", contou.
Múltiplas opções de testes
Cardozo explicou que os experimentos podem rodar em três locais: embarcado no robô, em um servidor do WebLab ou no próprio terminal remoto do usuário. No primeiro caso, o algoritmo do usuário é transferido para o robô e executado no seu processador de bordo. O tráfego seria limitado ao acompanhamento, por meio das câmeras, de alguns resultados que o computador transfere ao experimento.
No segundo caso, com o experimento rodando no servidor, há um tráfego intenso de telemetria dentro do laboratório e a interação com o servidor a partir do terminal do usuário se reduz ao acompanhamento.
"No terceiro caso, toda a telemetria de controle - isto é, tudo o que pode ser obtido do ambiente - precisa fluir entre o terminal remoto do usuário e o WebLab. Nesse aspecto, a rede de alto desempenho é fundamental, porque o experimento se dá em tempo real e não tolera atrasos", disse.
Laboratório rodando como servidor
O grupo de Cardozo prioriza a construção de WebLabs cuja interface de controle esteja conectada a um computador que se comporte como um servidor web. "Com isso, não usamos nada de proprietário. O usuário precisa apenas do navegador ou de uma aplicação em Java ou outra linguagem que permita essas interações com o servidor web", disse.
Ao acessar um laboratório localizado em outra cidade, o usuário capta imagens do ambiente em que estão os robôs e é capaz de interagir com eles. Segundo Cardozo, isso faz dos robôs equipamentos interessantes para esse tipo de experimento.
Robôs superequipados
"Os robôs capturam informações e interagem com o ambiente de maneira muito rica. Os que utilizamos têm uma câmera embarcada que pode ser movimentada remotamente. Contam também com sonares, sensores de ultra-som que permitem determinar um obstáculo em proximidade. E são equipados com medidores de distância a laser capazes de fazer varredura em 180 graus e cuja precisão permite estimar o formato dos obstáculos. Os robôs possuem ainda uma rede de comunicação sem fio e uma série de sensores, como bússolas, GPS e giroscópios", explicou.
Agenda de acesso ao laboratório virtual de robótica
A infra-estrutura dos WebLabs permite tarefas comuns a todos eles, de acordo com Cardozo. "A gerência de usuários, o cadastramento, a disponibilização do equipamento por um determinado tempo, a submissão de experimentos para o equipamento e os protocolos de segurança são comuns, independentemente do domínio de aplicação", disse.
O acesso ao equipamento é feito por uma página da web, segundo Cardozo, e isso permite eliminar os problemas com firewalls. "Usamos protocolos da web e o equipamento acessado exatamente como uma página. Ele pode também apresentar o acesso à telemetria em um formato XML, bastante popular nas aplicações web. O controle é similar ao que se usa quando se preenche um formulário na internet. Com isso é possível que sua aplicação possa rodar dentro de um navegador. É um modelo muito flexível", afirmou.






Único no mundo, chip que funciona com luz é lançado industrialmente
Dados magnéticos gravados em 3D multiplicam capacidade dos HDs
Informação magnética transferida para fóton viaja na velocidade da luz
Sensores do tamanho de grãos de sal vão monitorar corpo humano
Descoberto limite fundamental de absorção de energia eletromagnética
Rede de comunicação por luz interliga espaço, ar e mar com conectividade perfeita
Inovação matemática melhora muito detecção de terremotos
Monociclo com duas pernas será ideal para fazer entregas
Melhor rota para naves espaciais é traçada com teoria dos nós
Bateria de ferro totalmente líquida armazena energias renováveis
Fotografado pela primeira vez bizarro cristal formado apenas por elétrons
Criados bits quânticos que mantém dados à temperatura ambiente
Expansão do Universo pode estar desacelerando
Detectada onda gravitacional que pode ajudar a resolver mistério cósmico
Resolvido antigo mistério sobre a formação dos cristais
Único no mundo, chip que funciona com luz é lançado industrialmente
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.