Cardume de robôs demonstra cognição coletiva
Redação do Site Inovação Tecnológica - 23/06/2015
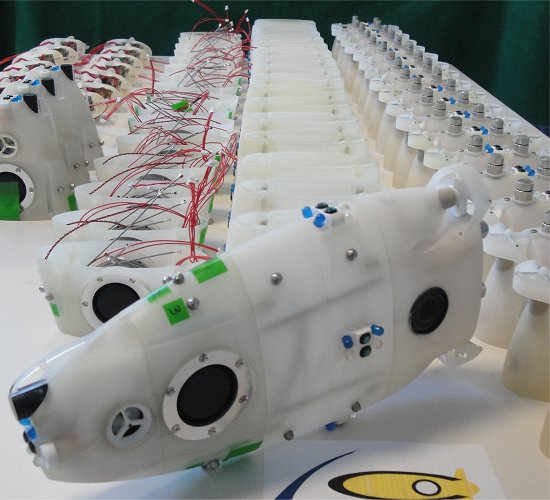
[Imagem: COCORO Project]
Enxames de robôs
Engenheiros europeus fizeram uma série de 10 demonstrações do que eles chamam de "escola de robôs".
Os robôs subaquáticos, que imitam peixes, trabalham em conjunto para replicar o comportamento de cardume visto nos animais reais.
O desenvolvimento dos robôs autônomos, mas de operação coordenada, capazes de "cognição coletiva", reuniu pesquisadores de diversas instituições europeias no âmbito do projeto CoCoRo (Collective Cognitive Robots, robôs cognitivos coletivos).
Segundo o professor Thomas Schmickl, da Universidade de Graz, na Áustria, os peixes-robôs interagem entre si e trocam informações para execução de objetivos comuns, o que representa um "sistema cognitivo que é consciente do seu ambiente".
Embora tenham desenvolvido seus algoritmos com base no estudo de diversos enxames animais - peixes, aves e insetos - os pesquisadores chegaram a comportamentos que podem ser extrapolados até para o ser humano.
"A forma pela qual alguns membros do enxame influenciam os outros é muito similar à forma como tendências são geradas por formadores de opinião em nossa sociedade," disse Schmickl.
Enxames hierárquicos

[Imagem: COCORO Project]
Em um dos experimentos, quando soltos em um tanque, os robôs começaram a interagir e trocar informações até terem conhecimento do tamanho do cardume que formavam.
Em outro cenário, eles se uniram para encontrar peças no fundo do tanque que simulavam os destroços de um avião. Assim que um dos robôs identificou o alvo, ele convocou todos os demais para completar a missão.
De olho em aplicações práticas, os robôs do projeto Cocoro foram testados em ambiente realístico, expostos a ondas, correntes e água salgada. Mesmo nessas condições, os robôs conseguiram se manter unidos durante missões de patrulhamento, retornando em conjunto à base depois de cumprida a missão.
A equipe agora está desenvolvendo "enxames hierárquicos", compostos por até três tipos de robôs, de forma a facilitar a programação de tarefas específicas, onde cada tipo de robô pode desempenhar um papel.
Artigo: BEECLUST Used for Exploration Tasks in Autonomous Underwater Vehicles
Autores: Michael Bodi, Christoph Möslinger, Ronald Thenius, Thomas Schmickl
Revista: Mathematical Modelling
Vol.: 8 - Part 1 (2015), 819-824
Link: http://zool33.uni-graz.at/artlife/node/268






Avanço na computação clássica coloca em xeque conceito de supremacia quântica
Processador fotônico de 192 dimensões faz computação massivamente paralela
Propriedade inusitada do arroz cria material inteligente anti-impacto
Cristais de espaço-tempo podem criar buracos negros microscópicos
Matemáticos provam que energia escura é um erro de interpretação
Luz funciona como freio, imitando um atrito físico
Reator solar recicla plástico e produz hidrogênio limpo
Luz faz metais vibrarem 1 trilhão de vezes por segundo
Suas telas vão ver você graças a um novo tipo de píxel
Computação quântica hiperdimensional é 500 vezes mais rápida
Processador fotônico de 192 dimensões faz computação massivamente paralela
Computação quântica hiperdimensional é 500 vezes mais rápida
Robô omnidirecional aproxima-se da eficiência máxima possível
Para descobrir novas leis da física, IA precisa desaprender teorias atuais
Além dos fótons: Quasipartícula faz computação só com luz
Matemática desvenda arte abstrata e revela pseudoarte feita por IA
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.