Como um simulador está ensinando robôs a cortar seres humanos com precisão
Redação do Site Inovação Tecnológica - 26/07/2021
[Imagem: USC]
Corte robotizado
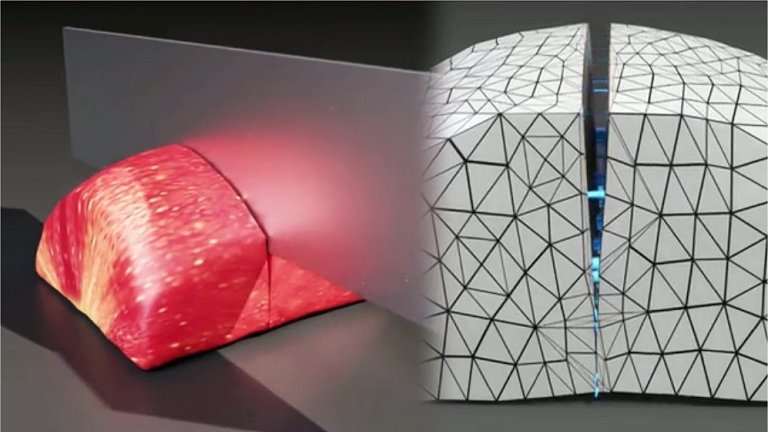
Pesquisadores da Universidade do Sul da Califórnia criaram um simulador de corte robotizado que consegue reproduzir com precisão as forças que atuam em uma faca conforme o robô a usa para cortar objetos macios e variáveis, como carne, frutas e vegetais.
A equipe está também aprimorando um módulo do simulador que permite simular o corte de tecidos humanos, uma vez que um dos objetivos dos pesquisadores é melhorar o desempenho dos robôs cirurgiões.
Um dos desafios para criar robôs inteligentes capazes de cortar coisas é que, no mundo real, não há dois objetos iguais - seja um paciente, um corte de carne em um frigorífico ou um alimento qualquer.
Para superar isso, a equipe desenvolveu uma abordagem única para simular o corte, introduzindo molas virtuais entre as duas metades do objeto sendo cortado, que por sua vez é representado por uma malha. Durante o processo de simulação, essas molas vão se enfraquecendo em proporção à força exercida pela faca.
"O que torna o nosso um tipo especial de simulador é que ele é 'diferenciável', o que significa que ele pode nos ajudar a ajustar automaticamente esses parâmetros de simulação a partir de medições do mundo real," disse o pesquisador Eric Heiden. "Isso é importante porque fechar essa lacuna de realidade é um desafio significativo para os roboticistas de hoje. Sem isso, os robôs nunca sairão da simulação para o mundo real."

[Imagem: USC]
Robôs médicos
Para transferir habilidades da simulação para a realidade, um simulador deve ser capaz de modelar um sistema real.
Em um dos experimentos de demonstração, os pesquisadores usaram um conjunto de dados de perfis de força de um robô físico para produzir previsões altamente precisas de como a faca se moveria na vida real.
Além de aplicações na indústria de processamento de alimentos, onde robôs industriais podem assumir tarefas perigosas, como cortes repetitivos, o simulador pode melhorar a precisão do feedback háptico de força em robôs cirúrgicos, ajudando a orientar os cirurgiões e evitar lesões nos pacientes.
"[Neste tipo de aplicação] é importante ter um modelo preciso do processo de corte e ser capaz de reproduzir de forma realista as forças que atuam na ferramenta de corte à medida que diferentes tipos de tecido são cortados," disse Heiden. "Com nossa abordagem, somos capazes de ajustar automaticamente nosso simulador para corresponder a esses diferentes tipos de material e obter simulações altamente precisas do perfil de força."
A equipe já está aplicando o simulador a robôs médicos e industriais do mundo real.
Artigo: DiSECt: A Differentiable Simulation Engine for Autonomous Robotic Cutting
Autores: Eric Heiden, Miles Macklin, Yashraj Narang, Dieter Fox, Animesh Garg, Fabio Ramos
Revista: Proceedings of Robotics: Science and Systems
DOI: 10.15607/RSS.2021.XVII.067
Artigo: DiSECt: A Differentiable Simulation Engine for Autonomous Robotic Cutting
Autores: Eric Heiden Miles Macklin Yashraj Narang Dieter Fox, Animesh Garg, Fabio Ramos
DOI: 10.15607/RSS.2021.XVII.067





Monociclo com duas pernas será ideal para fazer entregas
Metamaterial Mecânico Digital controla forma e propriedades em tempo real
Células vivas são controladas eletronicamente em tempo real
É possível criar uma tecnologia biológica, totalmente sustentável?
Módulos lógicos pneumáticos substituem controle eletrônico de robôs
Músculos artificiais - mais leves, mais seguros e mais robustos
Maior câmera astronômica do mundo está pronta
Inovação matemática melhora muito detecção de terremotos
Monociclo com duas pernas será ideal para fazer entregas
Bateria de ferro totalmente líquida armazena energias renováveis
Fotografado pela primeira vez bizarro cristal formado apenas por elétrons
Criados bits quânticos que mantém dados à temperatura ambiente
Expansão do Universo pode estar desacelerando
Detectada onda gravitacional que pode ajudar a resolver mistério cósmico
Resolvido antigo mistério sobre a formação dos cristais
Único no mundo, chip que funciona com luz é lançado industrialmente
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.