Este robô não precisa de qualquer eletrônico para andar
Redação do Site Inovação Tecnológica - 18/02/2021

[Imagem: University of California San Diego]
Robô a ar-comprimido
Este robô macio de quatro patas não precisa de nenhum circuito eletrônico para funcionar ou guiar seu movimento.
O robô precisa apenas de uma fonte constante de ar-comprimido para todas as suas funções, incluindo seus controles e sistemas de locomoção.
"Este trabalho representa um passo fundamental, mas significativo, em direção a robôs móveis totalmente autônomos e sem eletrônicos," disse Dylan Drotman, da Universidade da Califórnia em San Diego.
As aplicações em vista incluem robótica de baixo custo para entretenimento e brinquedos e robôs que podem operar em ambientes onde a eletrônica não pode funcionar, do interior de máquinas de ressonância magnética a minas subterrâneas.
Os robôs moles são de particular interesse porque se adaptam facilmente ao ambiente e operam com segurança perto de humanos.
Robótica macia
A maioria desses robôs macios é de fato movida por ar pressurizado, mas controlado por microprocessadores eletrônicos. Funciona, mas exige componentes complexos, como válvulas e bombas acionadas por atuadores, que nem sempre cabem dentro do corpo do robô.
Em contraste, este novo protótipo é controlado por um sistema leve e de baixo custo de circuitos pneumáticos, composto de tubos e válvulas flexíveis, tudo interno. O robô pode andar sob comando ou em resposta a sinais que detecta do ambiente.
"Com nossa abordagem, você poderia fazer um cérebro robótico muito complexo. Nosso foco aqui era fazer o sistema nervoso movido a ar mais simples necessário para controlar o andar," disse o professor Michael Tolley, cuja equipe vem trabalhando há alguns anos em sistemas de percepção robótica.
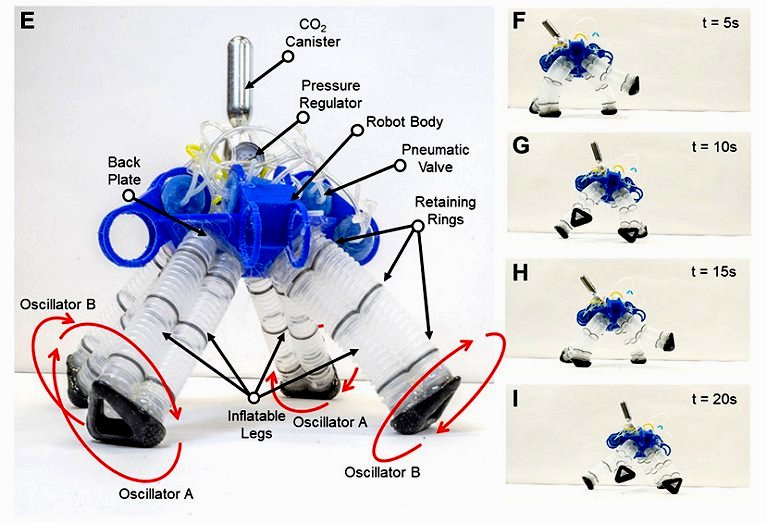
[Imagem: Dylan Drotman et al. - 10.1126/scirobotics.aay2627]
Computação com ar
O "poder computacional" do robô foi inspirado no modo como os reflexos dos mamíferos são guiados por uma resposta neural da espinha, em vez do cérebro.
Os circuitos neurais dos animais, chamados geradores de padrões centrais, são formados por elementos muito simples que podem gerar padrões rítmicos para controlar movimentos como caminhar e correr - o andar do robô foi inspirado no andar das tartarugas.
Em seu biomimetismo, a equipe construiu um sistema de válvulas que operam como osciladores, controlando a ordem na qual o ar-comprimido entra nos "músculos" nos quatro membros do robô. Uma das inovações é um componente que coordena a marcha do robô, retardando a injeção de ar nas pernas.
O robô também é equipado com sensores mecânicos simples, pequenas bolhas macias cheias de fluido, colocadas na extremidade das barras que se projetam do corpo. Quando as bolhas são pressionadas, o fluido aciona uma válvula que faz com que o robô mude de direção.
Artigo: Electronics-free pneumatic circuits for controlling soft-legged robots
Autores: Dylan Drotman, Saurabh Jadhav, David Sharp, Christian Chan, Michael T. Tolley
Revista: Science Robotics
Vol.: 6, Issue 51, eaay2627
DOI: 10.1126/scirobotics.aay2627





Novo reator transforma CO2 e eletricidade limpa em metano renovável
Miniaturização por encolhimento cria dispositivos que computam com luz
Hidrogênio poderá ser coletado por mineração, com custo mínimo
Dissipador de cobre otimizado derruba consumo de energia dos computadores
Computador quântico de luz tritura recorde de velocidade
Cola reversível ganha versão elétrica e substitui solda
Novo tipo de magnetismo dá impulso definitivo à computação magnética
Nova técnica reprograma a matéria rearranjando rapidamente seus átomos
Mágnons: Quasipartícula abre caminho para miniaturizar computadores quânticos
Como levantar 2.500 toneladas sem precisar de um guindaste
Tatus inspiram tecnologia para proteção de máquinas delicadas
Sensor de luz para robôs médicos surpreende e irá para indústria e automação
Músculo artificial inteligente integra sensibilidade e movimento
Como criar robôs inteligentes como os da ficção científica?
Internet corporal conecta dispositivos médicos ingeríveis e melhora exames
Materiais inertes aprendem a mudar de forma e se movimentam
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.