Exoesqueleto robótico melhora controle de equipamentos pelo cérebro
Redação do Site Inovação Tecnológica - 23/12/2010
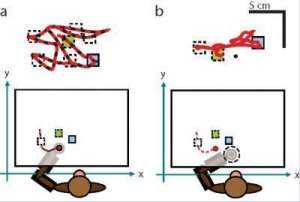
[Imagem: Hatsopoulos, et al.]
Diversos tipos de interfaces cérebro-máquina estão sendo desenvolvidos para ajudar pessoas paralisadas a comandarem equipamentos e a se comunicarem usando apenas seus pensamentos.
Agora, um grupo de pesquisadores da Universidade de Chicago, nos Estados Unidos, descobriu que é possível melhorar muito o rendimento das interfaces neurais já disponíveis sem qualquer modificação na própria interface, alterando somente o dispositivo robótico a ser controlado.
Feedback sensorial
O ganho de rendimento foi obtido dotando o braço robótico de "feedback sensorial", por meio do qual o dispositivo retorna ao usuário um estímulo que lhe permite "sentir" o objeto tocado.
Os dispositivos que traduzem a atividade do cérebro para controlar o movimento de um cursor de computador ou de um braço robótico já foram testados com sucesso em seres humanos.
Mas, nesses primeiros sistemas, a visão é a única ferramenta que o usuário pode usar para controlar o movimento.
No experimento agora realizado, os pesquisadores adicionaram um braço robótico - mais propriamente, um exoesqueleto - que também se move em resposta aos comandos cerebrais emitidos por meio da interface neural.
Como, para mexer o cursor e atingir o alvo na tela, o usuário na verdade pensa em mover o braço, o movimento real do braço paralisado, induzido pelo exoesqueleto, dá ao cérebro uma informação sinestésica sobre o movimento e a posição do braço no espaço.
Exoesqueleto robótico
Testada em macacos, a mesma interface cérebro-máquina deu resultados significativamente superiores com o braço robótico "dotado de sentido", em comparação com um braço robótico comum.
"Muitos pacientes portadores de deficiência motora podem ter um feedback sensorial parcial," afirma Nicholas Hatsopoulos, coautor do estudo. "Isso nos fez pensar que talvez pudéssemos utilizar esta forma natural de feedback com os 'robôs de vestir' para fornecer esse tipo de feedback."
Os macacos controlavam um cursor na tela do computador sem movimentar ativamente os braços, usando apenas a interface cerebral, que traduz a atividade no córtex motor primário do cérebro em movimentos do cursor.
Ao usar um exoesqueleto robótico que movimentava o braço do macaco em conjunto com o cursor, o controle do macaco sobre o cursor melhorou, atingindo os alvos mais rapidamente e seguindo caminhos mais retos.
"Nós observamos uma melhoria de 40 por cento no controle do cursor quando o exoesqueleto robótico movia os braços dos macacos," disse Hatsopoulos. "Isso pode ser muito significativo para as atividades diárias a serem realizadas por um paciente paralítico que receba um sistema deste tipo."
Recuperando o movimento
O ganho de desempenho foi obtido sem qualquer alteração na própria interface neural, que é de longe a parte do equipamento mais sensível e que tem imposto as maiores dificuldades de desenvolvimento.
"Eu acredito que todos os componentes estão aqui, não há nada nos retendo conceitualmente," disse Hatsopoulos. "Acho que usar estes robôs de vestir e controlá-las com o cérebro é, na minha opinião, a abordagem mais promissora para ajudar as pessoas paralisadas a recuperar a capacidade de se mover."
Recentemente um grupo de pesquisadores brasileiros desenvolveu um protocolo para interpretar pensamentos, em um feito que terá grande impacto para o futuro das interfaces cérebro-máquina.
Artigo: Incorporating feedback from multiple sensory modalities enhances brain-machine interface control
Autores: Aaron J. Suminski, Dennis C. Tkach, Andrew H. Fagg, Nicholas G. Hatsopoulos
Revista: The Journal of Neuroscience
Data: Dec. 15, 2010
Vol.: 30(50):16777-16787
DOI: 10.1523/JNEUROSCI.3967-10.2010






Tecnologia pós-binária: Material magnético armazena quatro bits
Bola de futebol com 80 átomos de boro desafia teorias
Para descobrir novas leis da física, IA precisa desaprender teorias atuais
Dessalinização solar não gera salmoura e extrai lítio para baterias
Neurotransístor simula e reforça memória e esquecimento do cérebro
Mini-universos podem surgir dentro de estrelas
Bateria inédita armazena hidrogênio ou eletricidade
Além dos fótons: Quasipartícula faz computação só com luz
Robô omnidirecional aproxima-se da eficiência máxima possível
Nova técnica de combustão viabiliza motores alimentados por amônia
Neurotransístor simula e reforça memória e esquecimento do cérebro
Como criar robôs inteligentes como os da ficção científica?
Processador biológico-eletrônico usa células cerebrais vivas para computação
Chips cerebrais vão se dissolver depois de fazerem seu trabalho
Material tem rigidez alterada remotamente por ondas sonoras
Implante neural menor que um grão de sal consegue ler seu cérebro
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.