Interação entre humanos e robôs é objetivo de novo robô humanóide
Redação do Site Inovação Tecnológica - 07/04/2008
[Imagem: MIT]
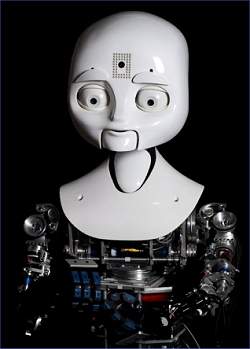
Pesquisadores do MIT apresentaram a "versão beta" do seu robô MDS, um pequeno robô humanóide que está sendo construído tendo como principal objetivo o entendimento das interações entre humanos e robôs.
MDS é uma sigla para "Mobile/Dexterous/Social", representando os três desafios que os engenheiros estão se propondo a desenvolver: a mobilidade, a habilidade para lidar com objetos e a sociabilidade.
Mobilidade e equilíbrio
A mobilidade foi resolvida com a adoção da plataforma uBot5, desenvolvida por outro grupo de pesquisadores, na Universidade Amherst, também nos Estados Unidos. Esta plataforma é uma espécie de Segway em miniatura, composta de duas rodas em equilíbrio dinâmico.
Foram construídos quatro MDS, cada um medindo cerca de um metro de altura. Eles estão sendo utilizados em experiências de laboratório sobre a interação com humanos, o trabalho em grupo e o aprendizado social, por meio da interação com humanos.
Mãos e braços robóticos
Os braços, desproporcionalmente longos, têm cinco graus de liberdade e foram projetados tendo em vista a funcionalidade para pegar, segurar e transportar objetos do dia-a-dia. O robô é capaz de carregar objetos de até 5 quilogramas.
As mãos têm três dedos, mais um polegar em posição oposta. O polegar e o indicador são controlados de forma independente, enquanto os dois dedos restantes têm funcionamento acoplado, movimentando-se em conjunto.
Robô com Linux
O cérebro dos MDS é um computador PC comum, rodando o sistema operacional Linux. Ele conta ainda com um processador gráfico, para tratar as imagens capturadas pelas duas câmeras digitais localizadas nos olhos do robô.
A navegação é feita por um sistema de rastreamento a laser, que permite que o robô não se choque com obstáculos pelo laboratório.
Pele robótica
Como um dos principais objetivos da pesquisa é a interação social do robô, foi dedicada especial atenção à sua pele. As coberturas de polímero, além de estéticas, funcionam com uma espécie de pele, dotadas de sensores capazes de identificar o toque humano - ou seja, o robô "sabe" quando alguém o está tocando.
O pescoço tem quatro graus de liberdade para permitir um leve balancear da cabeça, além dos movimentos tradicionais de rotação X e Y e aproximação. Ao contrário de outros robôs humanóides, que costumam se mover em câmera lenta, o MDS move o pescoço rapidamente, em atendimento a gestos humanos naturais, como o apontar de uma direção.
Expressão de emoções
O rosto do MDS tem nada menos do que 15 graus de liberdade, permitindo uma grande variedade de expressões, incluindo movimentos de sobrancelhas e uma mandíbula articulada. Para comparação, a fim de expressar todas as suas emoções, o rosto humano tem 80 músculos diferentes. Talvez isso explique o aspecto "tristonho" do MDS.
Completam o conjunto uma câmera infravermelho, quatro microfones para permitir a localização de sons, um microfone e um alto-falante, para a emissão dos sons do sintetizador de voz.
O desenvolvimento do MDS começou em janeiro de 2007 e deverá se estender até janeiro de 2009.







Robôs aspiradores de som prometem criar zonas de silêncio na sala
Devemos programar uma alma humana na inteligência artificial, propõe pesquisadora
ChatGPT projeta robô colhedor de tomates que funciona de verdade
Robôs devem ter direitos? Confucionismo tem alternativa melhor
Conheça o robô humanoide que pretende dominar o planeta
Robótica sonha em transformar você no Doutor Octopus
Oureno: Criado um "grafeno de ouro"
Célula solar atinge 190% de eficiência quântica
Chipset inovador para internet das coisas é apresentado pela USP
Criados bits quânticos que mantém dados à temperatura ambiente
Levitação magnética poderá viabilizar tecnologias antigravitacionais?
Intel apresenta maior computador neuromórfico inspirado no cérebro
Bateria de íons de sódio recarrega em segundos
Melhor rota para naves espaciais é traçada com teoria dos nós
Único no mundo, chip que funciona com luz é lançado industrialmente
Revolucionário: Luz gera magnetismo em material isolante
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.