Robô navega sem motor e sem bateria
Redação do Site Inovação Tecnológica - 01/06/2018
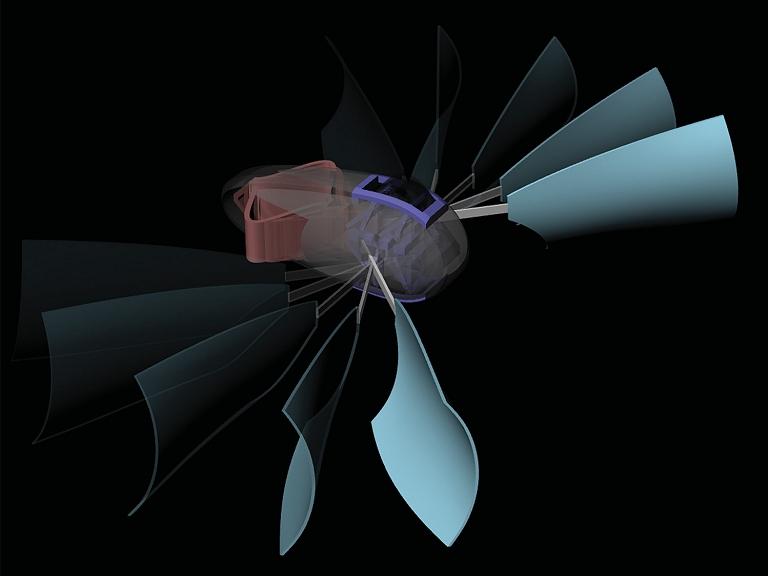
[Imagem: Tian Chen/Osama R. Bilal/Caltech]
Robô sem motor
Este robô subaquático move-se sem precisar de usar um motor, o que significa que ele também não precisa de baterias ou combustível.
Em vez disso, ele rema usando a deformação do próprio material com que é feito, deformação esta que é induzida por mudanças de temperatura.
"[Nosso protótipo] mostra que podemos usar materiais estruturados que deformam em resposta a sinais do ambiente para controlar e impulsionar robôs," disse o professor Chiara Daraio, do Instituto de Tecnologia da Califórnia, nos EUA, que desenvolveu o robô em colaboração com colegas do Instituto ETH de Zurique, na Suíça.
"Combinando movimentos individuais simples, nós fomos capazes de incorporar uma programação no material para realizar uma sequência de comportamentos complexos," acrescentou o pesquisador Osama Bilal.
Músculos artificiais autônomos
O novo sistema de propulsão se baseia em tiras de um polímero flexível que fica enrolado quando frio e se estende quando aquecido. O polímero é posicionado para ativar um interruptor dentro do corpo do robô, que por sua vez é preso a uma pá, posicionada como o remo de um barco.
O interruptor é feito de um elemento biestável, um componente que pode ser estável em duas geometrias distintas. Neste caso, ele é construído com tiras de um material elástico que, quando empurrado pelo polímero, alterna de uma posição para a outra. Quando o robô frio é colocado em água quente, o polímero se estica, ativa o interruptor e a liberação súbita de energia resultante movimenta o remo, empurrando o robô para a frente.
As tiras de polímero também podem ser ajustadas para dar respostas específicas em momentos diferentes: isto é, uma tira mais espessa levará mais tempo para se aquecer, esticar e, finalmente, ativar a sua pá do que uma tira mais fina. Essa capacidade permite construir robôs capazes de girar e se mover em diferentes velocidades.
Artigo: Harnessing bistability for directional propulsion of soft, untethered robots
Autores: Tian Chen, Osama R. Bilal, Kristina Shea, Chiara Daraio
Revista: Proceedings of the National Academy of Sciences
DOI: 10.1073/pnas.1800386115






Tatus inspiram tecnologia para proteção de máquinas delicadas
Propulsor híbrido químico-iônico acelera e barateia pequenos satélites
Transferência de calor é amplificada por material artificial
Para descobrir novas leis da física, IA precisa desaprender teorias atuais
Mágnons: Quasipartícula abre caminho para miniaturizar computadores quânticos
Computador probabilístico é fabricado com tecnologia de silício
Tecnologia pós-binária: Material magnético armazena quatro bits
Detectada pela primeira vez atividade magnética em exoplanetas
Capacitor revolucionário usa água para armazenar eletricidade
Além dos fótons: Quasipartícula faz computação inteiramente com luz
Tatus inspiram tecnologia para proteção de máquinas delicadas
Sensor de luz para robôs médicos surpreende e irá para indústria e automação
Músculo artificial inteligente integra sensibilidade e movimento
Como criar robôs inteligentes como os da ficção científica?
Internet corporal conecta dispositivos médicos ingeríveis e melhora exames
Materiais inertes aprendem a mudar de forma e se movimentam
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.