Robôs cirurgiões agora em versão <i>open-source</i>
Redação do Site Inovação Tecnológica - 16/01/2012
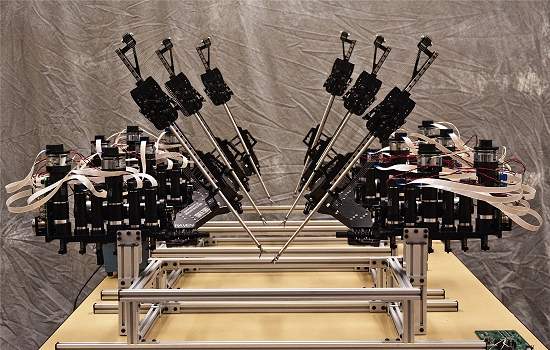
[Imagem: University of Washington]
Robôs com código aberto
Cientistas da Universidade de Washington, nos Estados Unidos, estão lançando uma plataforma open-source para robôs cirurgiões.
"Com todo o mundo trabalhando na mesma plataforma open-source nós poderemos compartilhar mais facilmente novos desenvolvimentos e inovações," afirma Blake Hannaford, um dos idealizadores da plataforma.
Várias equipes ao redor do mundo estão desenvolvendo robôs diferentes, estudando abordagens que não são compatíveis entre si e que, pelo alto custo, acabam não tendo um nível de teste suficiente para que entrem em operação.
"Os pesquisadores e as agências de financiamento estão cansadas de robôs 'filhos únicos', eles querem encarar projetos que usem plataformas padronizadas. Este é o rumo que a área [de robôs cirurgiões] está seguindo," defende o engenheiro.
Sistema operacional para robôs
A base de controle dos robôs é o Robot Operating System, um sistema operacional para robôs de código aberto.
Embora se fale em robôs cirurgiões como uma nova classe de robôs, a maioria dos trabalhos na área ainda se limita a criar novos programas de controle para robôs industriais.
"Pesquisadores acadêmicos têm acesso limitado a esses sistemas proprietários," afirma Hannaford. "Nós estamos mudando isto oferecendo um hardware de alta qualidade desenvolvido dentro da universidade.
"Cada laboratório vai começar com um sistema idêntico, totalmente operacional, mas cada um vai mudar o hardware e o software e compartilhar novos desenvolvimentos e novos algoritmos, ao mesmo tempo retendo os direitos de propriedade intelectual de suas próprias inovações," completa o pesquisador.







Hidrogênio poderá ser coletado por mineração, com custo mínimo
Dissipador de cobre otimizado derruba consumo de energia dos computadores
Novo tipo de magnetismo dá impulso definitivo à computação magnética
Nova técnica reprograma a matéria rearranjando rapidamente seus átomos
Aleatoriedade perfeita é alcançada pela primeira vez
Computador alternativo de silício resolve problemas intratáveis hoje
Mágnons: Quasipartícula abre caminho para miniaturizar computadores quânticos
Como levantar 2.500 toneladas sem precisar de um guindaste
Plumas de vapor na lua Europa são contestadas por novos dados
Superinox: O aço que pode viabilizar Economia do Hidrogênio
Tatus inspiram tecnologia para proteção de máquinas delicadas
Sensor de luz para robôs médicos surpreende e irá para indústria e automação
Músculo artificial inteligente integra sensibilidade e movimento
Como criar robôs inteligentes como os da ficção científica?
Internet corporal conecta dispositivos médicos ingeríveis e melhora exames
Materiais inertes aprendem a mudar de forma e se movimentam
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.