Como criar robôs inteligentes como os da ficção científica?
Com informações do Instituto Harbin de Tecnologia - 08/05/2026
[Imagem: Chen Yifan et al. - 10.1002/smb2.70003]
Robôs com inteligência artificial
Embora os avanços na inteligência artificial (IA) venham demonstrando capacidades notáveis no processamento de linguagem, visão e fala, essas tecnologias são tipicamente incorpóreas, desmaterializadas, virtuais.
Mas essa natureza incorpórea é insuficiente para a criação dos robôs inteligentes de propósito geral frequentemente imaginados na ficção científica.
Imagine, por exemplo, que você queira uma tarefa realizada e então dê a instrução: "Limpe o quarto". Uma IA clássica, incorpórea, consegue processar partes dessa tarefa: Ela pode interpretar o áudio (fala), entender o significado do comando (PNL) e detectar objetos em uma imagem estática (visão computacional). No entanto, a coisa acaba aí, justamente onde as capacidades da IA terminam, em uma análise passiva.
Um agente corpóreo, uma IA incorporada em um robô físico, por outro lado, precisa resolver o problema por completo. Isso deverá começar com a "percepção incorporada": À medida que o robô se move, ele percebe muito mais informações do que uma visão estática permite (por exemplo, encontrar um brinquedo escondido atrás de uma caixa). Em seguida, ele deverá usar a "tomada de decisão incorporada", conhecendo a sequência correta (por exemplo, jogar o lixo fora antes de organizar os brinquedos) e como lidar com problemas (como procurar um item perdido). Finalmente, o robô precisará realizar a "execução incorporada", os atos físicos de andar, pegar uma garrafa, abrir uma porta e, claro, fazer a limpeza.
Não é preciso recorrer à IA virtual para saber o quanto estamos longe da IA física. Mas é preciso começar o trabalho, por isso uma equipe do Instituto Harbin de Tecnologia, na China, fez um levantamento abrangente sobre a "IA Incorporada", mapeando sistematicamente o campo para orientar as pesquisas que deverão preencher a lacuna entre a análise passiva e a inteligência comportamental.
Rumo à IA Incorporada
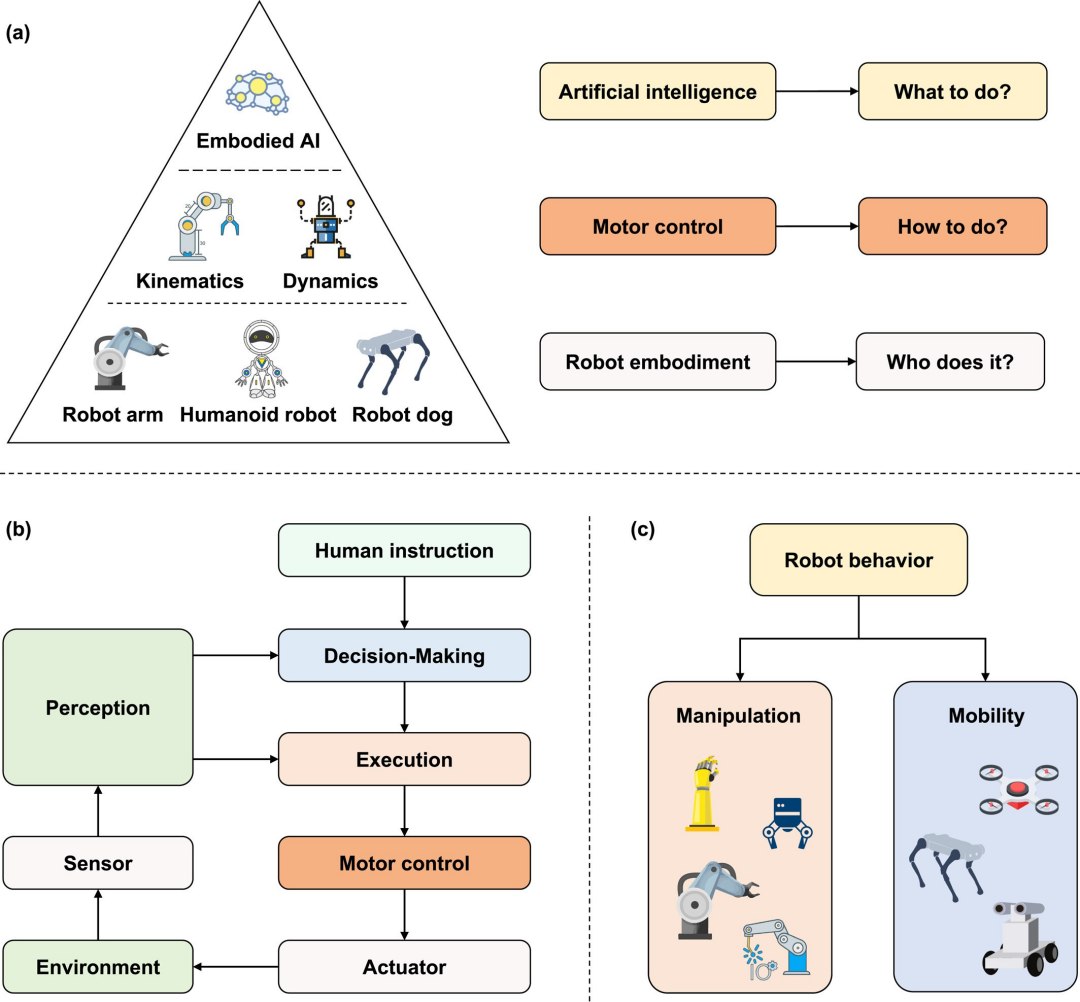
Os autores propõem que alcançar um comportamento inteligente em um robô é um processo que pode ser categorizado em três módulos.
[Imagem: Chen Yifan et al. - 10.1002/smb2.70003]
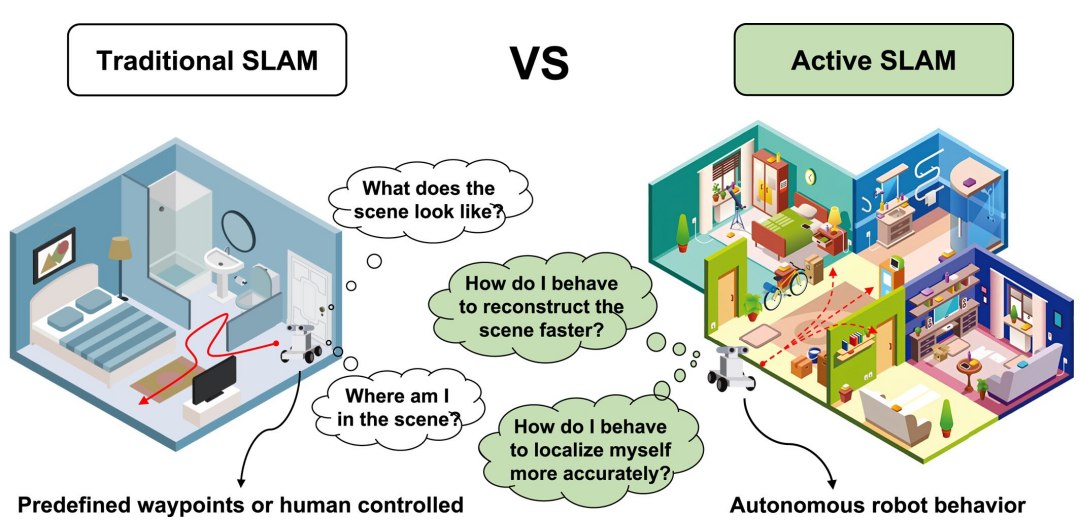
A estrutura começa com a Percepção Incorporada, que os autores categorizam com base em sua relação com o comportamento do robô.
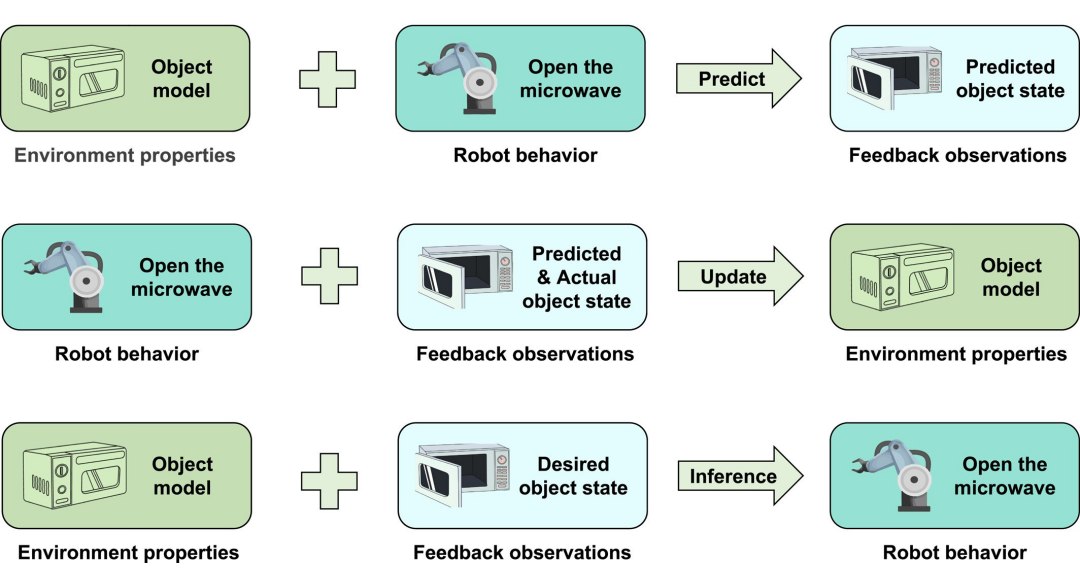
Tudo começa com a "percepção para comportamento", que se concentra nas tarefas de percepção utilizadas principalmente para as ações do robô. Isso inclui a percepção de objetos - sentir a forma geométrica, a estrutura articulada e as propriedades físicas de um objeto para permitir a manipulação - e a percepção da cena, que envolve a construção de modelos do ambiente, como mapas métricos ou topológicos, para orientar a mobilidade. A segunda área, mais distinta, é o "comportamento para percepção", que envolve incorporar o próprio comportamento do robô ao processo de percepção. Um agente deverá usar a mobilidade para se mover ativamente e obter mais informações sobre objetos e cenários, ou usar a manipulação para interagir com um objeto e descobrir suas propriedades, como sua estrutura articulada.
[Imagem: Chen Yifan et al. - 10.1002/smb2.70003]
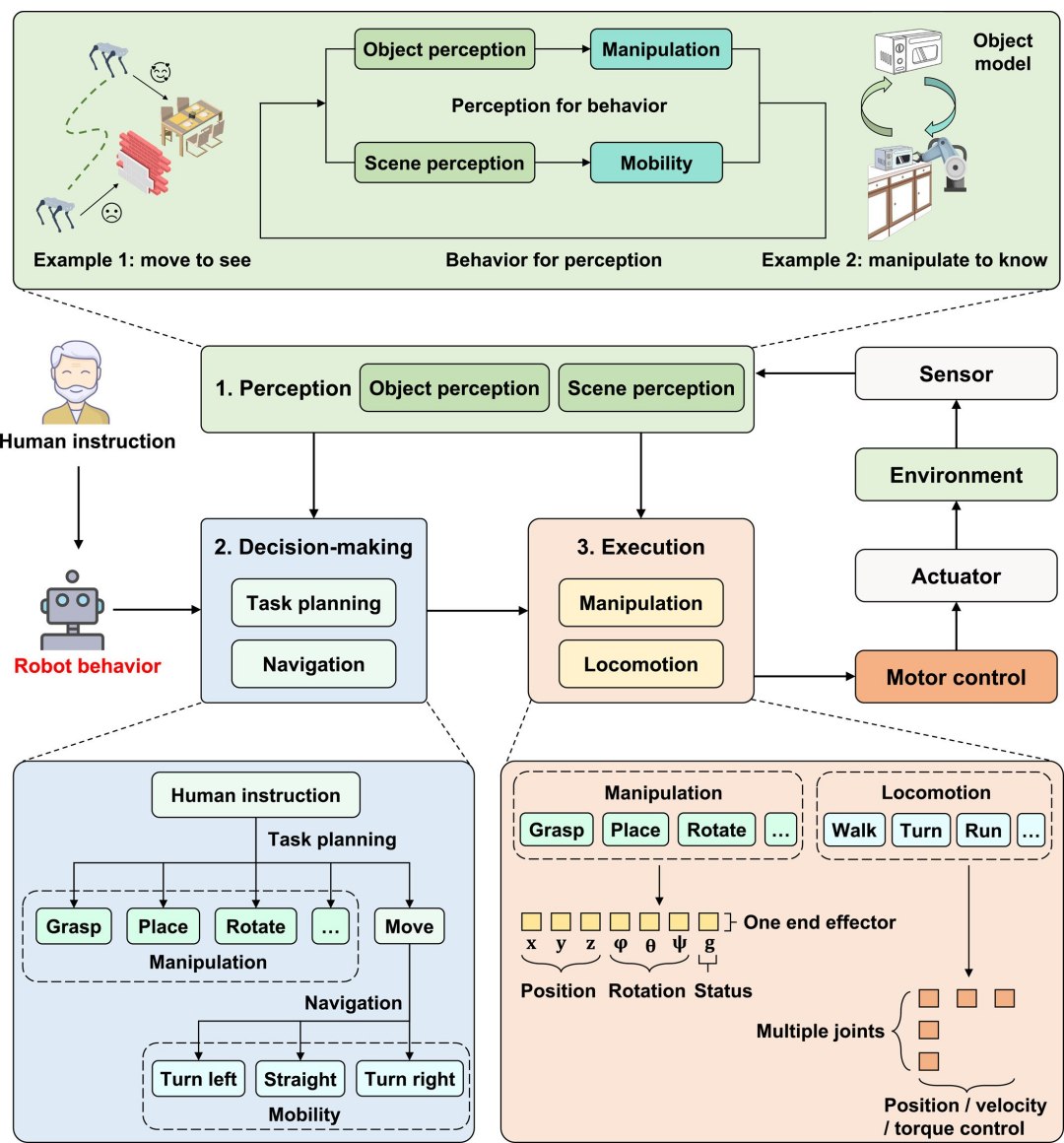
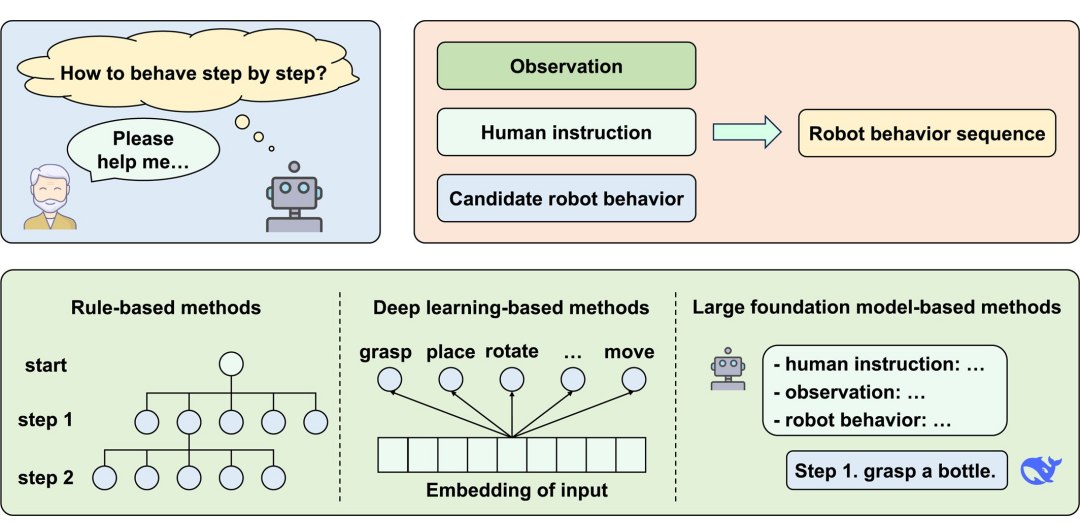
O segundo módulo, a Tomada de Decisão Incorporada, aborda como o agente precisará gerar uma sequência de comportamentos para completar uma instrução humana com base em suas observações.
O estudo categoriza essa etapa crucial em dois domínios principais: Navegação e Planejamento de Tarefas. A Navegação envolve o raciocínio de uma sequência de comandos de mobilidade (por exemplo, "virar à esquerda", "seguir em frente") para se mover por um ambiente, enquanto o Planejamento de Tarefas gera uma sequência de habilidades de manipulação (por exemplo, "abrir o micro-ondas", "pegar a garrafa"), incluindo etapas de navegação integradas. Os pesquisadores enfatizam que o desafio fundamental neste módulo é a ancoragem no mundo real: Ao contrário da tomada de decisão puramente digital, um agente incorporado deve levar em conta inúmeros desafios do mundo real, como viabilidade física, as "potencialidades" do objeto (relações entre o objeto e o agente) e as pré-condições.
[Imagem: Chen Yifan et al. - 10.1002/smb2.70003]
O módulo final, a Execução Incorporada, deverá traduzir a decisão gerada em ação física. Neste estudo, os pesquisadores focaram na aprendizagem de habilidades de manipulação, definindo-a como a aprendizagem de uma política comportamental que mapeia descrições de habilidades e observações ambientais para uma ação concreta, tipicamente uma trajetória de 7 graus de liberdade independente da corporeidade - nas avaliações, os pesquisadores usaram o caso de um braço robótico.
Atualmente existem duas abordagens algorítmicas principais sendo utilizadas para treinar uma política desse tipo: Aprendizagem por Imitação, que aprende com demonstrações humanas, e Aprendizagem por Reforço, que aprende por meio da interação por tentativa e erro. O principal problema nesta área está em alcançar a generalização, atingindo as capacidades em diversos objetos, cenários, habilidades e instruções. Mais recentemente, tem-se percebido uma tendência nesse esforço: Uma mudança do treinamento de modelos isolados de habilidade única para o desenvolvimento de Modelos de Execução de Propósito Geral, que, como uma aplicação direta dos grandes modelos de linguagem multimodais, conseguem lidar com múltiplas habilidades em um único modelo.
[Imagem: Chen Yifan et al. - 10.1002/smb2.70003]
A equipe espera que essa estrutura abrangente de três módulos permita estruturar o panorama das pesquisas científicas e tecnológicas na área, que poderá enfrentar sistematicamente os principais desafios seguindo um roteiro claro rumo à criação de agentes inteligentes de propósito geral incorporados - robôs com sua própria IA.
Artigo: Embodied AI: A Survey on the Evolution from Perceptive to Behavioral Intelligence
Autores: Chen Yifan, Mingjie Wei, Xuesong Wang, Yuanxing Liu, Jizhe Wang, Hao Song, Longxuan Ma, Donglin Di, Churui Sun, Kaifeng Liu, Le Qi, Jianing Yu, Xiang Tian, Shiqi Liang, Chuanxi Duan, Zijian Hong, Weinan Zhang, Ting Liu
Revista: SmartBot
Vol.: 1, Issue 3 e70003
DOI: 10.1002/smb2.70003







Bola de futebol com 80 átomos de boro desafia teorias
Tecnologia pós-binária: Material magnético armazena quatro bits
Para descobrir novas leis da física, IA precisa desaprender teorias atuais
Mini-universos podem surgir dentro de estrelas
Neurotransístor simula e reforça memória e esquecimento do cérebro
Dessalinização solar não gera salmoura e extrai lítio para baterias
Bateria inédita armazena hidrogênio ou eletricidade
Além dos fótons: Quasipartícula faz computação só com luz
Nova técnica de combustão viabiliza motores alimentados por amônia
Robô omnidirecional aproxima-se da eficiência máxima possível
Robô omnidirecional aproxima-se da eficiência máxima possível
Tatus inspiram tecnologia para proteção de máquinas delicadas
Sensor de luz para robôs médicos surpreende e irá para indústria e automação
Músculo artificial inteligente integra sensibilidade e movimento
Internet corporal conecta dispositivos médicos ingeríveis e melhora exames
Materiais inertes aprendem a mudar de forma e se movimentam
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.