Robôs que mudam de forma serão feitos com matéria ativa
Redação do Site Inovação Tecnológica - 14/03/2022
[Imagem: Jack Binysh]
Matéria ativa
Físicos descobriram uma nova maneira de revestir robôs macios com materiais funcionalizados, que permitem que eles se movam e funcionem de maneira programável e previsível, sem exigir programações detalhadas.
A chave está na chamada "matéria ativa", revestimentos que podem se ordenar espontaneamente, sem a necessidade de instruções de nível superior, informações externas ou mesmo programação.
A superfície de um material macio comum sempre encolhe em uma esfera. Pense na forma como a água se transforma em gotículas: A formação das gotas ocorre porque a superfície dos líquidos e outros materiais macios se contrai naturalmente na menor área de superfície possível - ou seja, uma esfera.
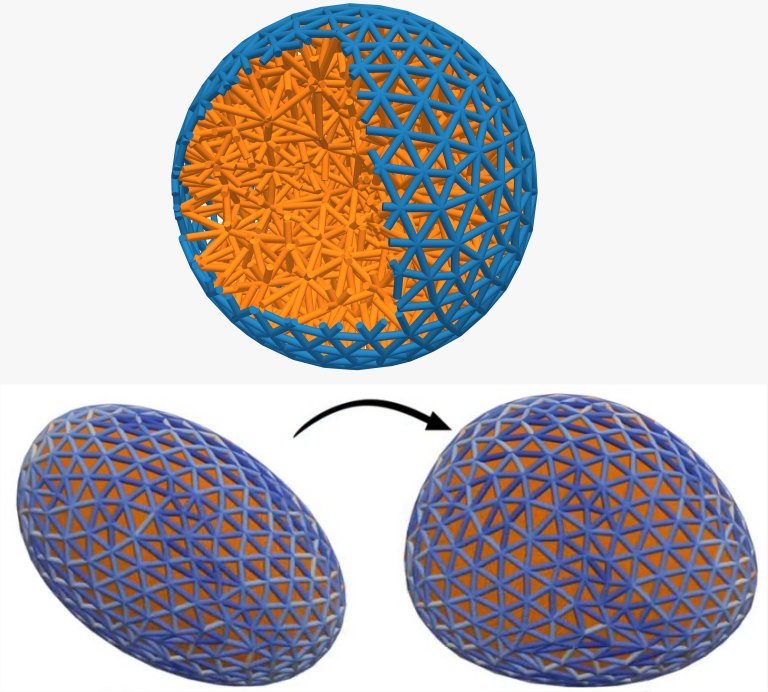
Mas a matéria ativa pode ser projetada para trabalhar contra essa tendência. Um exemplo seria uma bola de borracha envolta em uma camada de nanorrobôs, com esses robôs programados para trabalhar em uníssono para distorcer a bola em uma nova forma predeterminada (digamos, uma estrela).
Esses nanorrobôs são o que os pesquisadores chamam de inteligentículas, que podem apresentar comportamentos de auto-organização.
Jack Binysh e seus colegas das universidades Bath e Birmingham, no Reino Unido, acreditam que uma modelagem criativa da matéria ativa pode mudar o projeto dos robôs, permitindo determinar a forma, o movimento e o comportamento de um sólido macio não por sua elasticidade natural, mas pela atividade controlada da sua superfície.
[Imagem: Jack Binysh et al. - 10.1126/sciadv.abk3079]
Robôs morfológicos
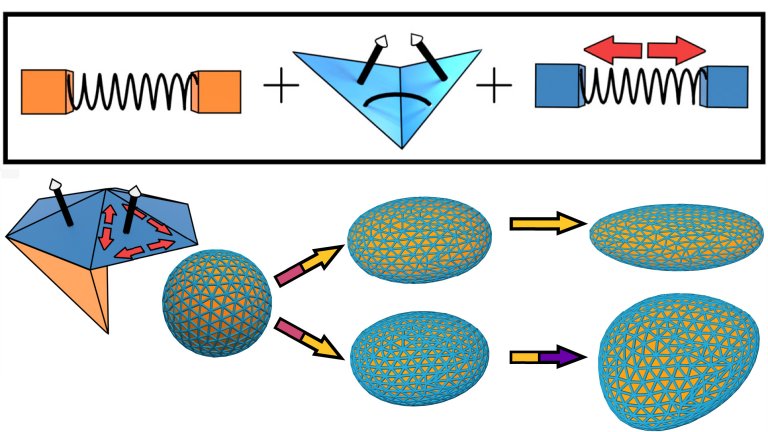
Em seu estudo inicial, os pesquisadores desenvolveram uma teoria e fizeram simulações computadorizadas de um sólido macio 3D cuja superfície experimenta tensões ativas, ou seja, que podem ser programadas no próprio material.
Eles constataram que essas tensões ativas expandem a superfície do material, puxando o sólido embaixo junto com ele e causando uma mudança global de forma. E a forma precisa assumida pelo sólido pode ser adaptada alterando as propriedades elásticas do material.
"Este estudo é uma importante prova de conceito e tem muitas implicações úteis. Por exemplo, a tecnologia futura poderia produzir robôs macios que são muito mais macios e melhores em pegar e manipular materiais delicados," disse o professor Anton Souslov, coordenador da equipe.
Na próxima fase do trabalho - que já começou - a equipe vai aplicar este princípio geral para projetar robôs específicos, como braços robóticos macios e materiais que nadam autonomamente ao serem colocados em líquidos. Eles também observarão o comportamento coletivo - por exemplo, o que acontece quando você tem muitos sólidos ativos, todos empacotados juntos.
[Imagem: Jack Binysh et al. - 10.1126/sciadv.abk3079]
Robôs que mudam de forma
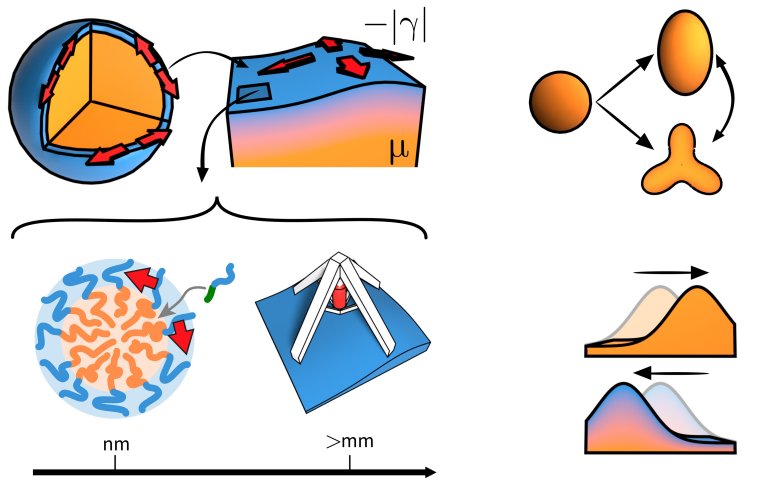
Os trabalhos com matéria ativa, todos em estágio ainda muito inicial, desafiam a suposição básica de que o custo energético da superfície de um líquido ou sólido macio deve sempre ser positivo porque uma certa quantidade de energia é sempre necessária para criar uma superfície.
"A matéria ativa nos faz olhar para as regras familiares da natureza - regras como o fato de que a tensão superficial tem que ser positiva - sob uma nova luz. Vendo o que acontece se quebrarmos essas regras, e como podemos aproveitar os resultados, é um lugar interessante para fazer pesquisas," disse Binysh.
A expectativa é que a matéria ativa leve a uma nova geração de máquinas cuja função virá de baixo para cima. Assim, em vez de serem governadas por um controlador central (como os braços robóticos de hoje são controlados nas fábricas), essas novas máquinas seriam feitas de muitas unidades ativas individuais que cooperam para determinar o movimento e a função da máquina. Isso é semelhante ao funcionamento dos nossos próprios tecidos biológicos, como as fibras do músculo cardíaco.
Usando esse conceito, torna-se possível projetar máquinas macias com braços feitos de materiais flexíveis impulsionadas por robôs simples, embutidos em sua superfície. O movimento autônomo também pode viabilizar novas formas de entregar medicamentos no corpo humano, com nanorrobôs que nadem pelos líquidos corporais, ou, em um horizonte mais próximo, adaptar o tamanho e a forma das cápsulas de remédios, revestindo sua superfície com nanopartículas responsivas e ativas, alterando a forma como a droga interage com as células do corpo.
Artigo: Active elastocapillarity in soft solids with negative surface tension
Autores: Jack Binysh, Thomas R. Wilks, Anton Souslov
Revista: Science Advances
Vol.: 8, Issue 10
DOI: 10.1126/sciadv.abk3079





Tatus inspiram tecnologia para proteção de máquinas delicadas
Propulsor híbrido químico-iônico acelera e barateia pequenos satélites
Transferência de calor é amplificada por material artificial
Para descobrir novas leis da física, IA precisa desaprender teorias atuais
Mágnons: Quasipartícula abre caminho para miniaturizar computadores quânticos
Computador probabilístico é fabricado com tecnologia de silício
Tecnologia pós-binária: Material magnético armazena quatro bits
Detectada pela primeira vez atividade magnética em exoplanetas
Capacitor revolucionário usa água para armazenar eletricidade
Além dos fótons: Quasipartícula faz computação inteiramente com luz
Tatus inspiram tecnologia para proteção de máquinas delicadas
Sensor de luz para robôs médicos surpreende e irá para indústria e automação
Músculo artificial inteligente integra sensibilidade e movimento
Como criar robôs inteligentes como os da ficção científica?
Internet corporal conecta dispositivos médicos ingeríveis e melhora exames
Materiais inertes aprendem a mudar de forma e se movimentam
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.