Robótica sonha em transformar você no Doutor Octopus
Redação do Site Inovação Tecnológica - 07/02/2023
[Imagem: MUVE/Imperial College]
Membros biônicos
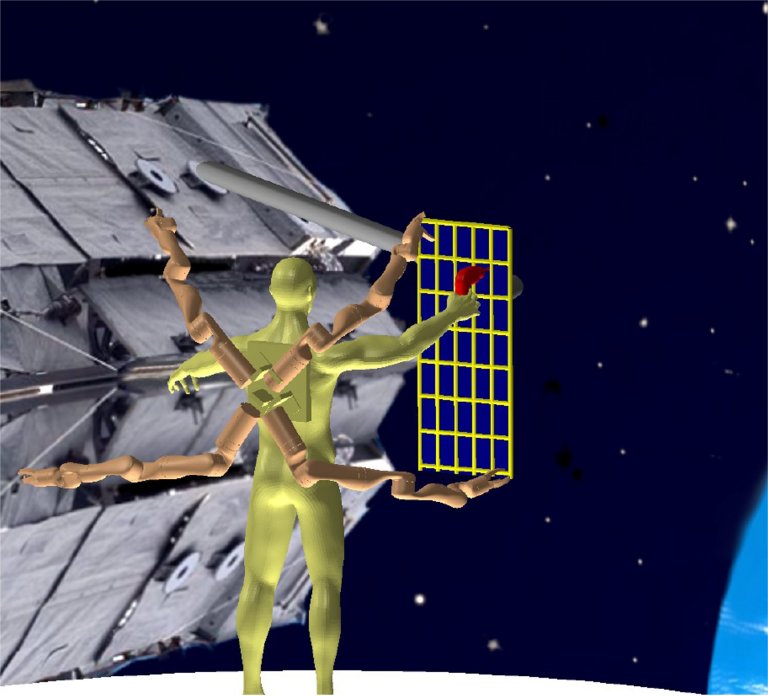
Engenheiros das universidades de Freiburg (Alemanha) e Imperial College (Reino Unido) acreditam estar próximos de desenvolver um sensor neural que permitirá que os humanos possam ter membros adicionais, como o Doutor Octopus dos quadrinhos.
As aplicações são inumeráveis, de braços adicionais para que os astronautas segurem vários equipamentos e ferramentas durante as caminhadas espaciais até mãos auxiliares para que os cirurgiões segurem todos os instrumentos que precisem a cada momento. Os trabalhadores na construção civil e os idosos também poderão se beneficiar diretamente desses avanços.
Enfim, o objetivo é criar seres humanos aprimorados.
"Acreditamos que membros robóticos extras podem ser uma nova forma de aumento humano, melhorando as habilidades das pessoas em tarefas que já podem realizar, bem como expandindo sua capacidade de fazer coisas que simplesmente não podem fazer com seus corpos humanos naturais. Se os humanos puderem facilmente adicionar e controlar um terceiro braço, ou uma terceira perna, ou mais alguns dedos, eles provavelmente os usariam em tarefas e capacidades, descobrindo novos comportamentos que ainda não podemos imaginar," prevê o professor Dario Farina em um artigo publicado na revista Spectrum, do Instituto de Engenheiros Eletricistas e Eletrônicos (IEEE).
Especialista em neurorreabilitação, o professor Farina está liderando uma equipe interdisciplinar de especialistas em robótica e neurociência para verificar se a tecnologia atual já permite fazer uma ponte entre o cérebro e membros artificiais, de modo que esses dispositivos biomecatrônicos sejam controlados como os membros naturais biológicos.
A ideia é dar um salto de qualidade nos dois campos.
Em primeiro lugar, em relação aos equipamentos atuais, que ainda precisam ser acionados por controles manuais, como joysticks - a vantagem de um membro artificial se vai se você precisar de um membro natural para controlá-lo.
Em segundo lugar, as interfaces cérebro-máquina disponíveis ainda são absolutamente invasivas, inviáveis para pessoas saudáveis e, mesmo quando implantadas em pacientes de epilepsia grave, por exemplo, têm baixa resolução.
[Imagem: M. Bräcklein et al. - 10.1088/1741-2552/abcdbf]
Interfaces musculares
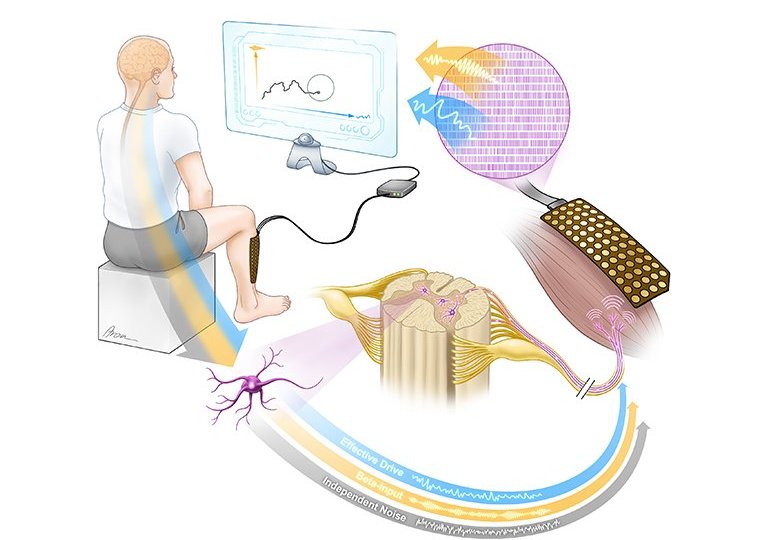
As interfaces neurais não invasivas concentram-se sobretudo na leitura de sinais de eletroencefalografia, com vários produtos comerciais disponíveis.
Contudo, para tentar elevar a resolução e a precisão dos sensores, e simplificar o uso, a equipe está apostando suas fichas na eletromiografia, detectando sinais dos músculos, e não diretamente do sistema nervoso. Em vez de trabalhar para compreender os sinais dos neurônios, essa técnica permite "ler" a ação já nos músculos, deixando o trabalho complicado para o corpo fazer.
Usando uma eletromiografia de alta densidade, já é possível "desentrelaçar" os sinais de centenas de eletrodos postos em um pequeno emplastro aplicado sobre a pele, o que representa a possibilidade de captar os sinais dos neurônios motores da espinha dorsal. A equipe já testou esses sensores em várias partes do corpo, concluindo que o mais prático é usá-los no braço ou na perna.
"Nossos eletrodos de superfície de alta densidade fornecem boa amostragem em vários locais, permitindo-nos identificar e decodificar a atividade de uma proporção relativamente grande dos neurônios motores espinhais envolvidos em uma tarefa. E agora podemos fazer isso em tempo real, o que sugere que podemos desenvolver sistemas de interface cérebro-máquina não invasivos com base em sinais da medula espinhal," disse o professor Farina.
O sistema ainda exige o tradicional mecanismo de treinamento de uma rede neural, que é intensivo em computação. Contudo, essa etapa só precisa ser feita uma vez por usuário - se o adesivo com os sensores for mudado para outro lugar do corpo também é necessário refazer o treinamento. Já o mecanismo para uso em tempo real é bastante rápido, com latência na casa dos milissegundos.

[Imagem: Nathanael Jarassé/ISIR Sorbonne]
Ser humano aprimorado
Os testes com as interfaces cérebro-máquina começam com os procedimentos mais simples, controlando cursores em uma tela. Mas a equipe já deu o passo seguinte, instalando um laboratório de realidade virtual no Imperial College.
O ambiente virtual possibilita trabalhar com até quatro braços robóticos simultâneos em cenários simulados. A estrutura permitirá que os sistemas computacionais avancem e sejam testados exaustivamente antes da construção de protótipos, o que é mais caro e possui seus próprios problemas de engenharia.
A equipe, contudo, afirma não estar encontrando grandes dificuldades na construção desses protótipos. "O verdadeiro desafio não será anexar o hardware, mas sim identificar várias fontes de controle que sejam precisas o suficiente para realizar ações complexas e precisas com as partes do corpo robótico," disse Farina.
Outro grande desafio no qual a equipe pretende se concentrar é descobrir como o corpo e o cérebro humanos reagem ante a incorporação de membros artificiais, por exemplo, no tocante plasticidade do sistema nervoso, à necessidade de concentração exclusiva do operador e à operação simultânea de membros robóticos e artificiais.
"Se a resposta a qualquer uma dessas perguntas for não, não teremos uma tecnologia prática, mas ainda teremos uma nova ferramenta interessante para pesquisa na neurociência do controle motor. Se a resposta for sim, podemos estar prontos para entrar em uma nova era de aumento humano. Por enquanto, nossos dedos (biológicos) estão cruzados," concluiu Farina.
Artigo: Towards human motor augmentation by voluntary decoupling beta activity in the neural drive to muscle and force production
Autores: M. Bracklein, J. Ibáñez, D. Y. Barsakcioglu, D. Farina
Revista: Journal of Neural Engineering
Vol.: 18 016001
DOI: 10.1088/1741-2552/abcdbf
Link: https://spectrum.ieee.org/human-augmentation
Artigo: Roboticists Want to Give You a Third Arm
Autores: Dario Farina, Etienne Burdet, Carsten Mehring, Jaime Ibáñez
Revista: IEEE Spectrum
Link: https://spectrum.ieee.org/human-augmentation







Tatus inspiram tecnologia para proteção de máquinas delicadas
Propulsor híbrido químico-iônico acelera e barateia pequenos satélites
Transferência de calor é amplificada por material artificial
Para descobrir novas leis da física, IA precisa desaprender teorias atuais
Mágnons: Quasipartícula abre caminho para miniaturizar computadores quânticos
Computador probabilístico é fabricado com tecnologia de silício
Tecnologia pós-binária: Material magnético armazena quatro bits
Detectada pela primeira vez atividade magnética em exoplanetas
Capacitor revolucionário usa água para armazenar eletricidade
Além dos fótons: Quasipartícula faz computação inteiramente com luz
Como criar robôs inteligentes como os da ficção científica?
Processador biológico-eletrônico usa células cerebrais vivas para computação
Chips cerebrais vão se dissolver depois de fazerem seu trabalho
Material tem rigidez alterada remotamente por ondas sonoras
Implante neural menor que um grão de sal consegue ler seu cérebro
Lavar frutas e verduras na banheira? É quase isso, só que melhor
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.