Roda robótica passa direto por cima
Redação do Site Inovação Tecnológica - 08/08/2016
[Imagem: Universidade Bielefeld]
Roda 2.0
Embora as rodas redondas pareçam ter resolvido bem o problema de transporte desde o início da história, algumas situações especiais já exigiram a criação de rodas quadradas, rodas ajustáveis e até rodas inteligentes.
Usos especiais é o mesmo motivo por trás dos esforços de Jan Paskarbeit e seus colegas da Universidade Bielefeld, na Alemanha.
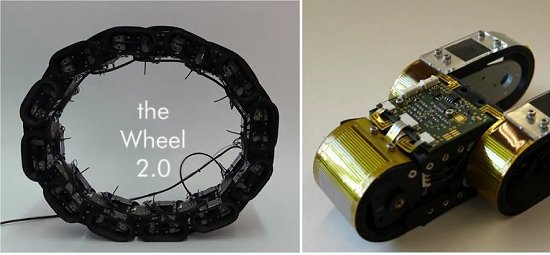
Eles criaram uma roda robótica capaz de se mover por conta própria, sem depender de um eixo de acionamento ou sistema de transmissão de força - ela foi batizada de "roda 2.0", ou Ourobot.
Parecida com uma corrente de bicicleta, a roda robótica é formada por 12 segmentos motorizados individualmente.
Quando detecta um obstáculo, o segmento passa adiante a informação, fazendo com que os segmentos à sua frente se desloquem de forma apropriada para que a roda altere seu desenho e se conforme ao obstáculo, o que lhe permite subir gastando menos energia, ou descer sem sair em disparada.
Roda 3.0

[Imagem: Universidade Bielefeld]
Por mais que o conceito seja promissor, a equipe ainda está dando seus primeiros giros. A roda robótica ainda não é autônoma - sua energia é suprida por cabos e o processamento dos sensores e o controle dos motores dos diversos módulos também são feitos externamente.
Além disso, o Ourobot só consegue andar em linha reta - a roda 2.0 não consegue fazer curvas. Por isso, a equipe afirma já ter ideias promissoras para fazer uma "roda 3.0", que possa ser onidirecional.
"Nós queremos desenvolver um robô que mude ativamente de forma, que possa se adaptar ao seu ambiente como uma ameba, capaz de se alongar e se encolher novamente," disse o professor Axel Schneider, coordenador da equipe.
Artigo: OUROBOT - A self Propelled Continuous Track Robot for Rugged Terrain
Autores: Jan Paskarbeit, Simon Beyer, Adrian Gucze, Johann Schroder, Matthaeus Wiltzok, Manfred Fingberg, Axel Schneider
Revista: Proceedings of the IEEE/ICRA 2016
Vol.: Page(s): 4708 - 4713
DOI: 10.1109/ICRA.2016.7487671






Monociclo com duas pernas será ideal para fazer entregas
Metamaterial Mecânico Digital controla forma e propriedades em tempo real
Células vivas são controladas eletronicamente em tempo real
É possível criar uma tecnologia biológica, totalmente sustentável?
Módulos lógicos pneumáticos substituem controle eletrônico de robôs
Músculos artificiais - mais leves, mais seguros e mais robustos
Bateria de ferro totalmente líquida armazena energias renováveis
Bateria de íons de sódio recarrega em segundos
Intel apresenta maior computador neuromórfico inspirado no cérebro
Criados bits quânticos que mantém dados à temperatura ambiente
Levitação magnética poderá viabilizar tecnologias antigravitacionais?
Detectada onda gravitacional que pode ajudar a resolver mistério cósmico
Melhor rota para naves espaciais é traçada com teoria dos nós
Revolucionário: Luz gera magnetismo em material isolante
Único no mundo, chip que funciona com luz é lançado industrialmente
Resolvido antigo mistério sobre a formação dos cristais
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.