Dedo robótico com nervos de aço para operar no fundo do mar
Redação do Site Inovação Tecnológica - 14/10/2015
[Imagem: Erik D. Engeberg et al./B&B/FAU]
Nervos de aço
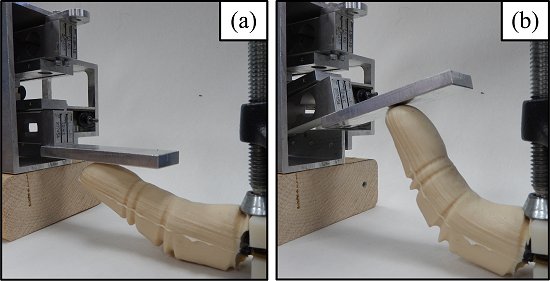
Inspirados na biologia humana, engenheiros construíram um dedo robótico que se movimenta como um dedo real - um dedo real beeem calmo.
O modelo inicial foi a reconstrução em CAD 3D de um dedo humano, e as "peças" foram construídas com uma impressora 3D.
No lugar dos nervos, o dedo robótico usa músculos artificiais do tipo liga com memória de forma (LMF, ou SMA na sigla em inglês), que recebem um "treino térmico" para aprender a se movimentar adequadamente.
"Nós treinamos termomecanicamente nosso dedo robótico para imitar os movimentos de um dedo humano, como a flexão e a extensão. Devido à sua leveza, destreza e força, nosso projeto robótico oferece enormes vantagens em relação aos mecanismos tradicionais e, em última análise, poderia ser adaptado para ser usado em um dispositivo protético, como uma mão robótica," disse Erik Engeberg, da Universidade Atlântica da Flórida, nos EUA.
Talvez no futuro. Por enquanto, isso seria problemático porque as ligas com memória de forma exigem um processo de aquecimento e resfriamento para funcionar.
"Para superar esse desafio, nós exploramos a ideia de usar essa tecnologia para robótica submarina, porque isso forneceria naturalmente um ambiente de arrefecimento rápido," esclarece Engeberg.
Robótica submarina
Os movimentos são feitos com um processo de aquecimento resistivo chamado "aquecimento Joule", que envolve a passagem de uma corrente elétrica através de um condutor que libera calor.
O atuador extensor assume uma forma reta quando é aquecido, enquanto o atuador flexor assume uma forma curva quando aquecido. Um chassi elétrico foi projetado para permitir que as correntes elétricas fluam através de cada atuador. Um desenho em forma de U faz a corrente elétrica circular pelos músculos artificiais a partir de uma fonte de energia na base do dedo.
Funciona, mas o movimento é lento, mesmo com uma entrada de ar forçada para resfriar os nervos artificiais.
Mas, dado que o objetivo inicial é usar o dedo robótico em operações submarinas, Engeberg projetou isoladores térmicos na ponta do dedo, que são mantidos abertos para facilitar o fluxo de água no interior do dedo.
Conforme o dedo flexiona e estende, a água flui através da cavidade interna dentro de cada isolante para resfriar os atuadores.
Artigo: Anthropomorphic finger antagonistically actuated by SMA plates
Autores: Erik D. Engeberg, Savas Dilibal, Morteza Vatani, Jae-Won Choi, John Lavery
Revista: Bioinspiration & Biomimetics
Vol.: 10, Number 5





Geladeira que esfria usando músculos artificiais já gela uma cerveja
Brinquedo vira gerador de eletricidade supereficiente
Uma visão 3D do caos dentro de um metal derretido
Metamaterial Mecânico Digital controla forma e propriedades em tempo real
Olhos de insetos ajustáveis e duráveis feitos com lentes microscópicas
É possível criar uma tecnologia biológica, totalmente sustentável?
Metafluidos: Vêm aí os líquidos inteligentes
Oureno: Criado um "grafeno de ouro"
Chipset inovador para internet das coisas é apresentado pela USP
Célula solar atinge 190% de eficiência quântica
Fotografado pela primeira vez bizarro cristal formado apenas por elétrons
Criados bits quânticos que mantém dados à temperatura ambiente
Intel apresenta maior computador neuromórfico inspirado no cérebro
Bateria de íons de sódio recarrega em segundos
Revolucionário: Luz gera magnetismo em material isolante
Melhor rota para naves espaciais é traçada com teoria dos nós
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.