Um micromotor preciso o suficiente para microcirurgias
Redação do Site Inovação Tecnológica - 09/02/2026
[Imagem: Dunfa Long et al. - 10.34133/cbsystems.0424]
Gruda e desliza
Engenheiros desenvolvem um novo atuador de alta precisão que já nasce talhado para acionar os minúsculos instrumentos médicos usados nas cirurgias robóticas, incluindo as microcirurgias.
Quando se necessita de movimentos pequenos e precisos, a escolha natural são os atuadores piezoelétricos, equipamentos que transformam energia elétrica em movimento mecânico com grande eficiência. Juntamente com sua rapidez e tamanho compacto, isto os tornou componentes essenciais na fabricação de nanoestruturas e na microrrobótica.
No entanto, eles são tipicamente "motores lineares", apresentando um alcance de movimento naturalmente muito curto.
Para superar essa limitação, a indústria utiliza mecanismos do tipo grudar-deslizar (stick-slip), o movimento intermitente que ocorre quando dois objetos deslizam um sobre o outro, devido à diferença entre o atrito estático (maior) e o atrito dinâmico/cinético (menor).
Funciona, mas esses projetos sofrem com a falta de simetria, o que significa que o robô ou ferramenta vai se mover de forma diferente para frente e para trás, apresentando solavancos ou variações de velocidade que comprometem a repetibilidade e a precisão em tarefas críticas, como as cirurgias robotizadas.
[Imagem: Dunfa Long et al. - 10.34133/cbsystems.0424]
Atuador linear piezoelétrico
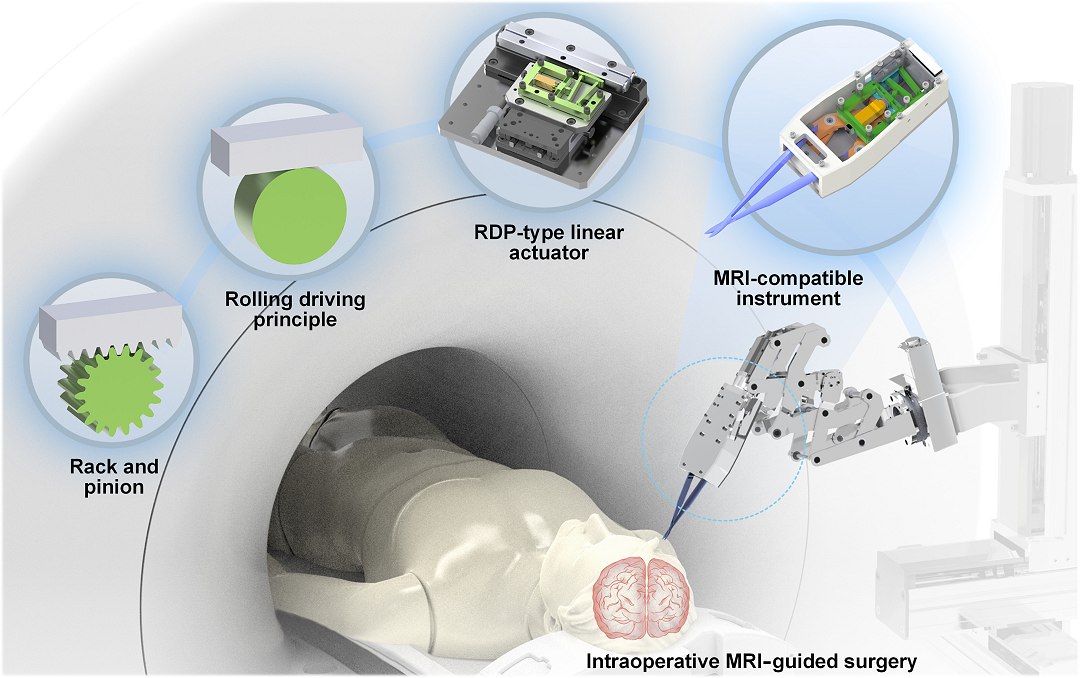
É aí que entra o novo atuador piezoelétrico baseado em um "princípio de acionamento por rolamento", criado por Dunfa Long e colegas do Instituto de Tecnologia de Pequim, na China, que se revelou capaz de realizar movimentos bidirecionais extremamente consistentes e suaves.
A inovação baseia-se em um mecanismo de ligação de quatro barras e uma estrutura trapezoidal isósceles flexível. Inspirado no sistema de cremalheira e pinhão, como os usados nas colunas de direção dos automóveis, o atuador utiliza uma superfície curva para manter um contato de rolamento puro com o controle deslizante.
Diferente de modelos anteriores, que exigiam múltiplos elementos piezoelétricos e ajustes manuais complexos, a nova arquitetura utiliza apenas um único cristal cerâmico piezoelétrico - este é o elemento atuador, já que um material piezoelétrico converte um pulso elétrico em um deslocamento mecânico, o que permite um controle muito preciso de cada movimento.
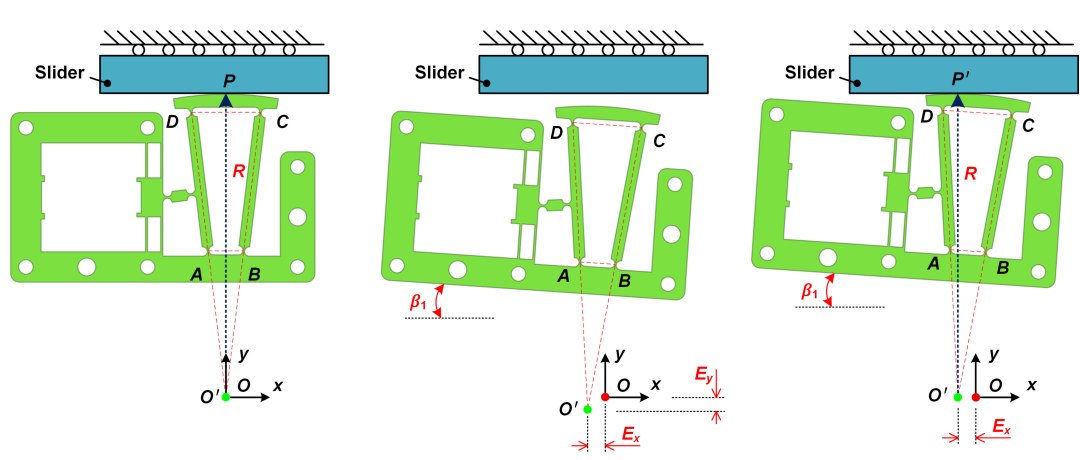
O novo atuador linear utiliza uma estrutura flexível simétrica que elimina falhas comuns de precisão: A geometria simétrica garante que a força de contato permaneça constante durante todo o ciclo de movimento, resultando em uma trajetória linear quase perfeita.
[Imagem: Dunfa Long et al. - 10.34133/cbsystems.0424]
Bom na prática
Em testes de alta frequência, o dispositivo alcançou coeficientes de linearidade de 0,99999, o que indica um movimento extremamente fluido e livre de flutuações bruscas, o que o torna perfeito para atender às exigências rigorosas de controle impostas por instrumentos cirúrgicos delicados.
Isto não significa que o atuador seja fraco ou lento. O protótipo manteve um desempenho estável tanto em baixas quanto em altas frequências, suportando cargas de até 1,2 kg. Em velocidades elevadas, ele atingiu cerca de 37 mm/s com uma diferença mínima de consistência entre os sentidos de direção (7,54% de variação).
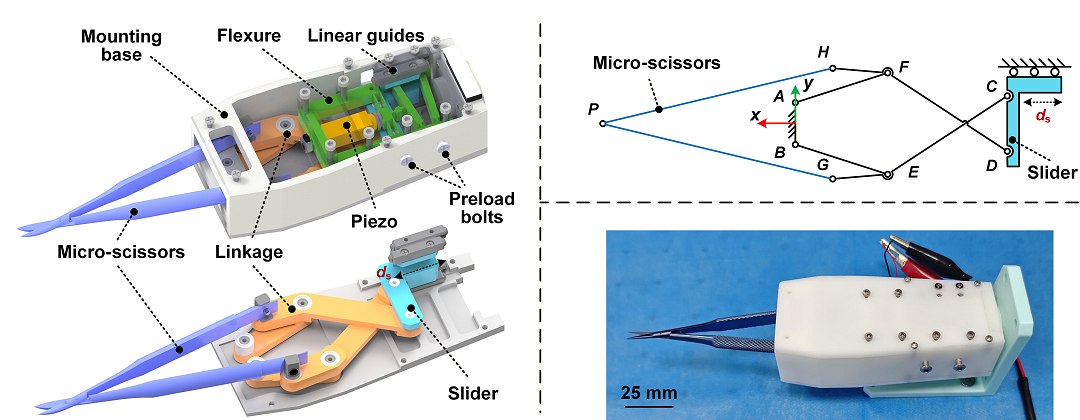
A demonstração final veio com o desenvolvimento de um instrumento microcirúrgico compatível com ambientes de ressonância magnética. O protótipo foi validado em experimentos de corte, demonstrando que a tecnologia pode ser integrada a ferramentas cirúrgicas robóticas para procedimentos minimamente invasivos, onde a suavidade do movimento é vital para a segurança do paciente.
Artigo: A Novel Rolling Driving Principle-Enabled Linear Actuator for Bidirectional Smooth Motion
Autores: Dunfa Long, Fujun Wang, Chengzhi Hu, Chaoyang Shi
Revista: Cyborg and Bionic Systems
DOI: 10.34133/cbsystems.0424






Dessalinização solar não gera salmoura e extrai lítio para baterias
Mini-universos podem surgir dentro de estrelas
Computação quântica hiperdimensional é 500 vezes mais rápida
Bateria inédita armazena hidrogênio ou eletricidade
Válvulas eletrônicas renascem e superam transistores em 1.000 vezes
Relógio quântico de pêndulo supera limites de precisão
Nova técnica de combustão viabiliza motores alimentados por amônia
Robô omnidirecional aproxima-se da eficiência máxima possível
Neurotransístor simula e reforça memória e esquecimento do cérebro
Fotossíntese artificial fica autônoma e dispensa baterias
Músculo artificial amplifica movimento e memoriza toque
Nova técnica de combustão viabiliza motores alimentados por amônia
Propulsor híbrido químico-iônico acelera e barateia pequenos satélites
Material artificial guia vibrações por trajetórias predefinidas
Tecnologia inovadora otimiza ímãs para motores de última geração
Músculo artificial inteligente integra sensibilidade e movimento
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.