Atuador robótico supera capacidades do pulso humano
Redação do Site Inovação Tecnológica - 03/06/2024
[Imagem: Yan Xu et al. - 10.34133/cbsystems.0111]
Robôs sobre-humanos
A capacidade do pulso humano de girar em torno do eixo do antebraço em 2 direções é crucial para muitas atividades diárias. Mas essa rotação, limitada a uma faixa de aproximadamente -90° a +90°, restringe a capacidade do pulso de executar tarefas operacionais complexas.
Por exemplo, quando giramos a chave em uma fechadura, nosso pulso realiza um grande movimento rotacional. Quando parafusamos, o pulso precisa girar 180° várias vezes. Porém, devido ao ângulo de rotação limitado, a mão precisa soltar a chave de fenda várias vezes para completar todo o processo de trabalho.
Assim, embora se inspirem na biologia e na anatomia humana, quando os engenheiros vão projetar braços, mãos e garras robóticas, eles tentam eliminar essas limitações, criando robôs industriais mais versáteis e, via de regra, com capacidades sobre-humanas.
Foi o que fizeram Yan Xu e colegas do Instituto de Tecnologia de Pequim e da Universidade Zhejiang, ambos na China.
[Imagem: Yan Xu et al. - 10.34133/cbsystems.0111]
Torção bidirecional
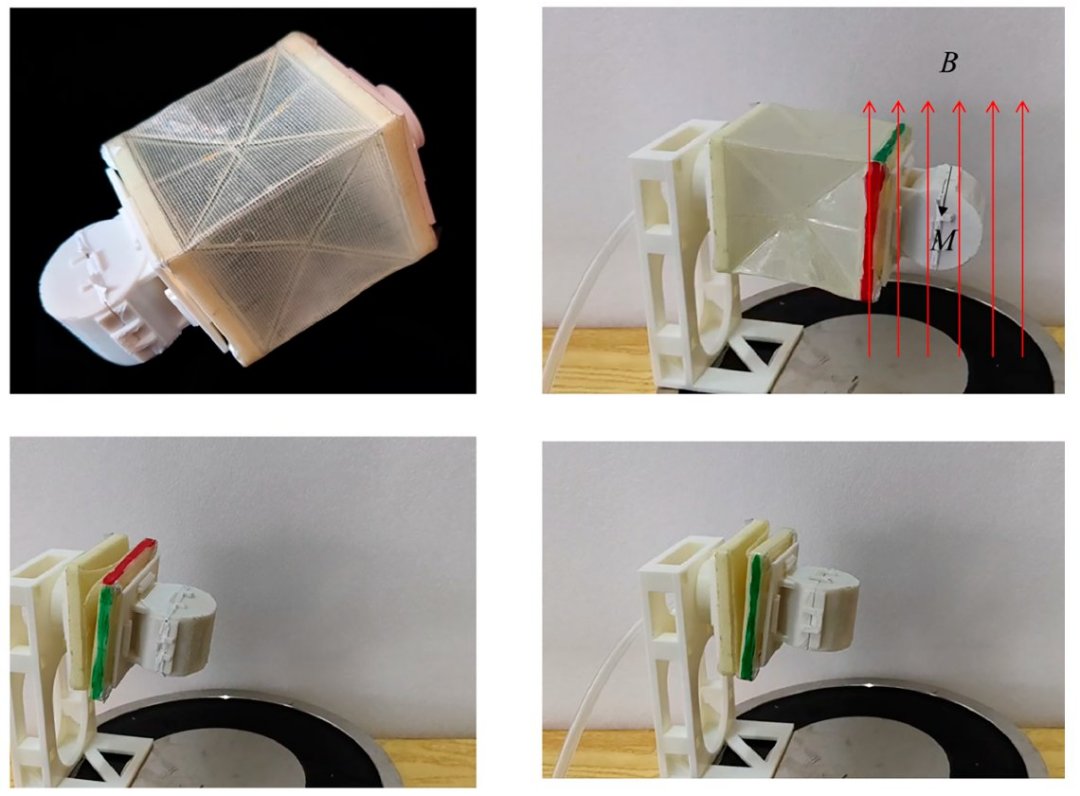
A fim de obter uma grande taxa de rotação em um único atuador, Xu idealizou um atuador híbrido magnético-pneumático, inspirado no pulso humano, mas com uma capacidade de torção bidirecional. Para fazer esta última parte, o pesquisador se inspirou em um padrão de origami conhecido como Kresling.
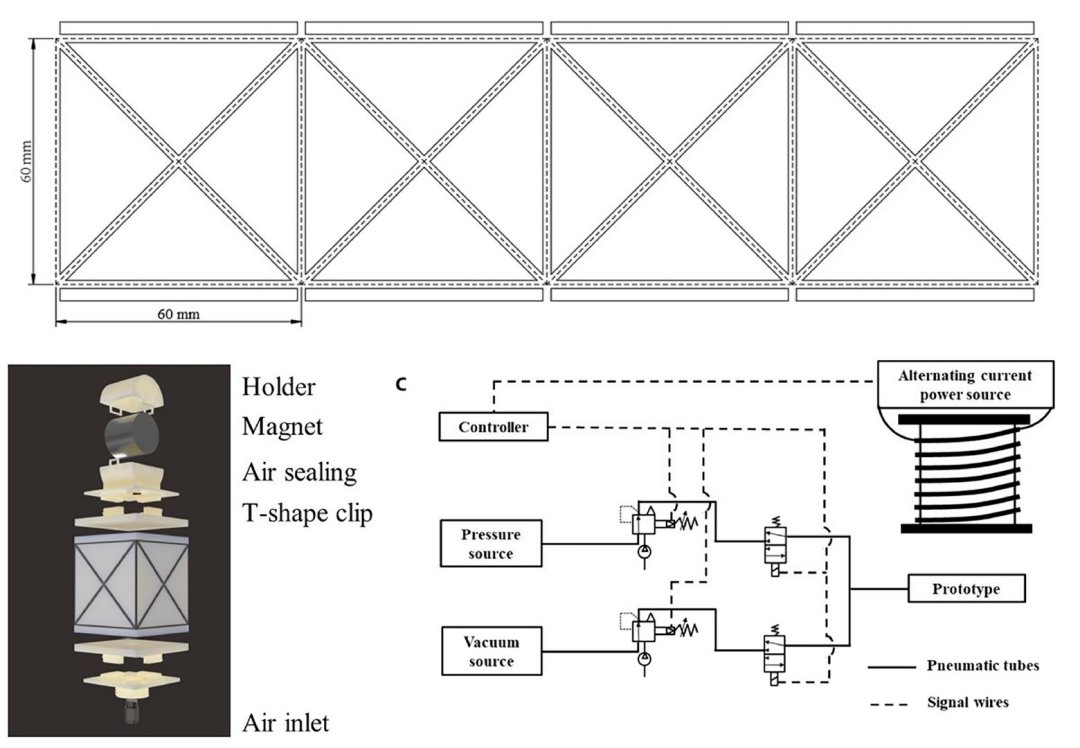
Para conseguir uma flexão bidirecional, os pesquisadores redesenharam o padrão de vinco Kresling adicionando um vinco em cada paralelogramo. Os painéis planos do padrão de dobradura, aplicados em PVC (policloreto de vinila), criam uma cavidade interna hermética, acima da qual é colocado um ímã.
A torção bidirecional é alcançada por um método de atuação híbrido, que a equipe chama de atuador magnetopneumático. O atuador pode manter três estados estacionários e ainda se deformar para produzir a torção bidirecional.
Primeiro, é aplicado um campo magnético externo (a parte "magneto" do atuador) no plano do painel superior, o que resulta em um torque nesse plano. A seguir, a cavidade interna do atuador é aspirada (a parte pneumática). A ação combinada de pressão de vácuo e do torque é mantida até o atuador se dobrar completamente. Ele pode retornar à configuração inicial ou girar na direção oposta quando o campo magnético e a pressão interna são ajustados.
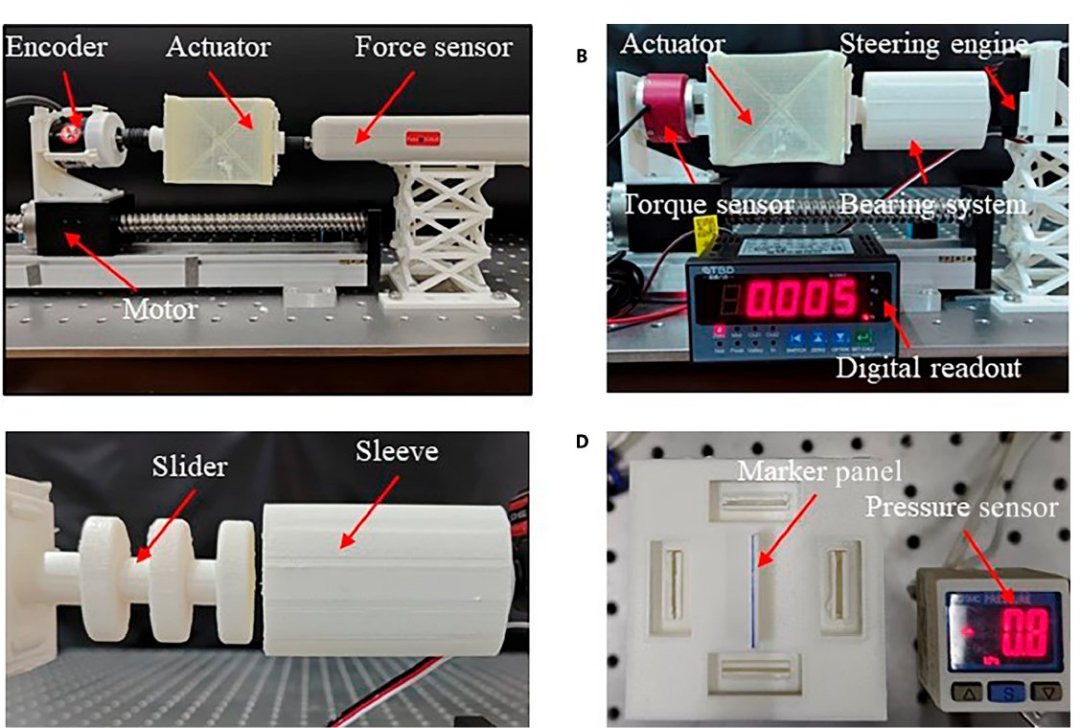
Para verificar as características quase-estáticas do atuador, os pesquisadores fizeram uma série de experimentos, incluindo experimentos de compressão, de atuação e experimentos de características de fadiga. O protótipo passou com louvor por todos eles.
[Imagem: Yan Xu et al. - 10.34133/cbsystems.0111]
E dá para melhorar
O design exclusivo deste atuador permite atingir um grande ângulo de rotação através do movimento de torção bidirecional usando um único módulo.
Mas é possível fazer muito mais. Usando o modelo que a equipe desenvolveu, eles já vislumbram a possibilidade de aumentar o número de lados do polígono, criando um atuador capaz de atingir ângulos de rotação ainda maiores. Segundo os cálculos, um atuador com seis lados atingirá um ângulo de rotação de 239,5° e sua taxa de rotação excederá 277°, cerca de duas vezes a maior já relatada em toda a literatura sobre robótica.
Segundo a equipe, a criação de um atuador com capacidades de movimento de torção superiores à do pulso humano tem perspectivas de aplicação promissoras em várias tarefas operacionais complexas. E o movimento de torção bidirecional aumenta ainda mais a flexibilidade e a manobrabilidade dos robôs.
Artigo: A Wrist-Inspired Magneto-Pneumatic Hybrid-Driven Soft Actuator with Bidirectional Torsion
Autores: Yan Xu, Kaiwen Ju, Chao Zhang
Revista: Cyborg and Bionic Systems
Vol.: 5 Article ID: 0111
DOI: 10.34133/cbsystems.0111





Novo reator transforma CO2 e eletricidade limpa em metano renovável
Miniaturização por encolhimento cria dispositivos que computam com luz
Cola reversível ganha versão elétrica e substitui solda
Hidrogênio poderá ser coletado por mineração, com custo mínimo
Computador quântico de luz tritura recorde de velocidade
Dissipador de cobre otimizado derruba consumo de energia dos computadores
Novo tipo de magnetismo dá impulso definitivo à computação magnética
Nova técnica reprograma a matéria rearranjando rapidamente seus átomos
Mágnons: Quasipartícula abre caminho para miniaturizar computadores quânticos
Como levantar 2.500 toneladas sem precisar de um guindaste
Engenheiros tentam dar adeus à bigorna com nova tecnologia de soldagem
Meta-robôs sem baterias ou motores mudam de forma, movimentam-se e agarram coisas
Folhas magnéticas manipulam objetos sem precisar agarrá-los
Robô-caracol inspecionará edifícios e pás de turbinas eólicas
Garra robótica macia de 130g levanta 100kg de carga
Enxame de pequenos veículos transporta até 40 toneladas
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.