Tatus inspiram tecnologia para proteção de máquinas delicadas
Redação do Site Inovação Tecnológica - 02/06/2026
[Imagem: Jianyu Zhou/NCSU]
Biomimetismo do tatu
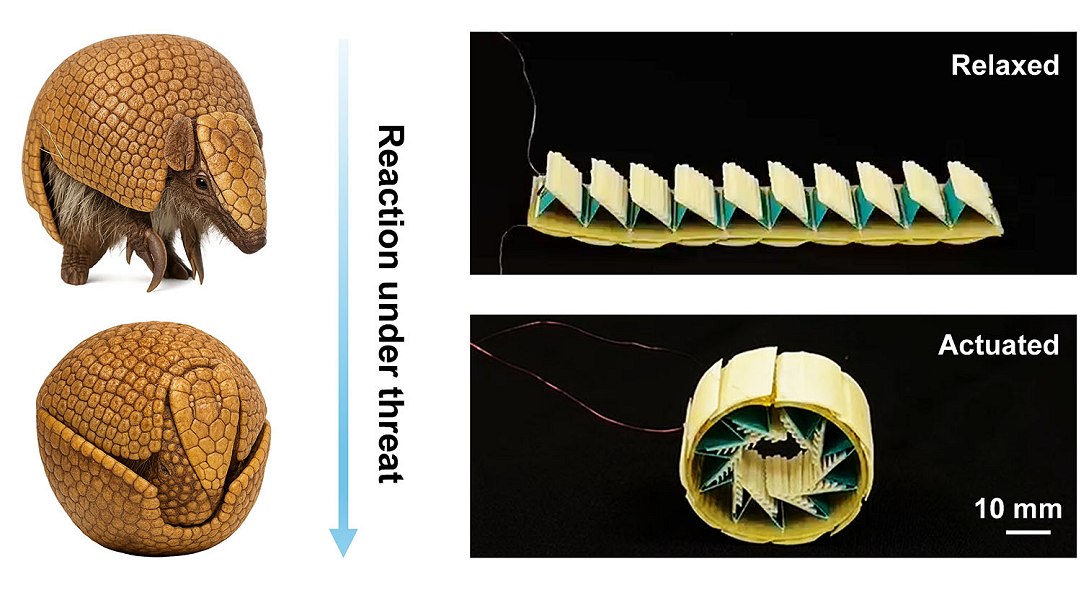
Pesquisadores foram buscar inspiração nos tatus para criar uma estrutura de proteção que reage a ameaças externas, enrolando-se em uma bola para proteger seu conteúdo.
A estrutura foi projetada para reagir automaticamente ao detectar tensão mecânica, podendo ser ajustada para responder a qualquer nível de força, desde um toque delicado até um impacto significativo.
Em seu estado normal, a estrutura é flexível e macia, mas o gatilho a faz transformar-se em uma estrutura externamente rígida, servindo como proteção - uma autêntica carapaça de tatu artificial.
A ideia é que esse escudo possa servir de proteção para "máquinas macias", uma nova geração emergente de máquinas e robôs construídos com materiais moles, bem como para aparelhos delicados, incluindo eletrônicos.
"Tem havido um grande crescimento nos campos da robótica flexível e da eletrônica flexível, mas esses dispositivos também costumam ser frágeis. Nosso objetivo era desenvolver uma solução que permitisse o funcionamento dessas tecnologias frágeis, mas que as protegesse quando necessário," contextualizou Yong Zhu, da Universidade Estadual da Carolina do Norte, nos EUA.
[Imagem: Jianyu Zhou et al. - 10.1126/sciadv.aed2516]
Carapaça artificial de tatu
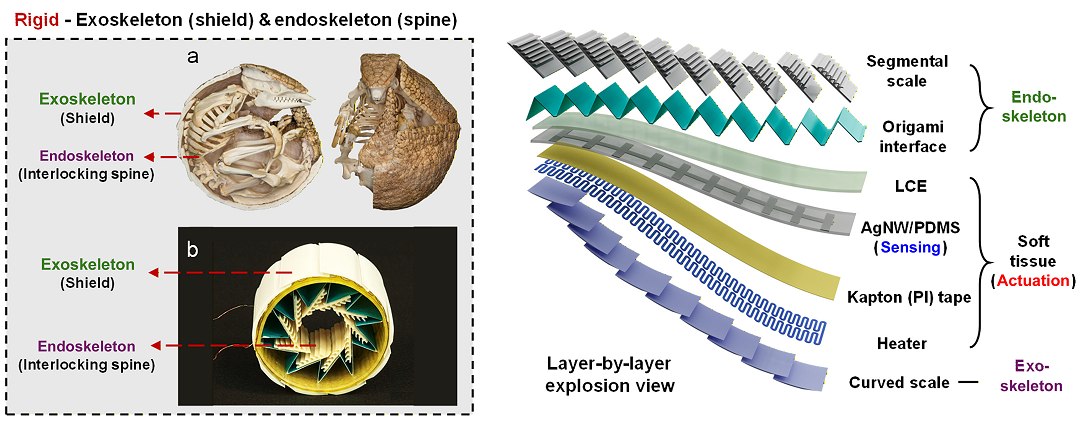
A estrutura robótica inspirada no tatu, que os pesquisadores chamam de módulo protetor de intertravamento morfológico, consiste em três camadas principais.
A camada externa, ou exoesqueleto, é composta por uma série de escamas segmentadas e curvas, feitas de resina impressa em 3D. A camada intermediária, de "sensoriamento e atuação", consiste em quatro partes: Um elastômero de cristal líquido, que se contrai quando aquecido; um sensor de deformação, feito de polímero elástico com nanofios de prata incorporados; uma camada de fita Kapton que se expande quando aquecida; e uma fina camada de tecido condutor, que funciona como uma camada de aquecimento. Por fim, há uma camada de endoesqueleto, composta por papel resistente dobrado em uma série de sulcos, que mantém no lugar uma fileira de "escamas segmentadas" de polímero rígido.
Quando o sensor de tensão detecta um toque ou impacto, ele envia um sinal para uma unidade de controle, que então energiza a camada de aquecimento. À medida que a camada se aquece, ela faz com que a camada de elastômero se contraia e a camada de fita Kapton se expanda, fazendo com que toda a estrutura se curve. O resultado final é que a estrutura se enrola em um círculo protetor, com o exoesqueleto voltado para fora.
"À medida que as camadas se curvam em um círculo, as escamas segmentares no endoesqueleto do módulo se encaixam umas nas outras, criando um 'esqueleto' interno robusto que contribui para a firmeza da estrutura," detalhou Zhou.
[Imagem: Jianyu Zhou et al. - 10.1126/sciadv.aed2516]
Interessados?
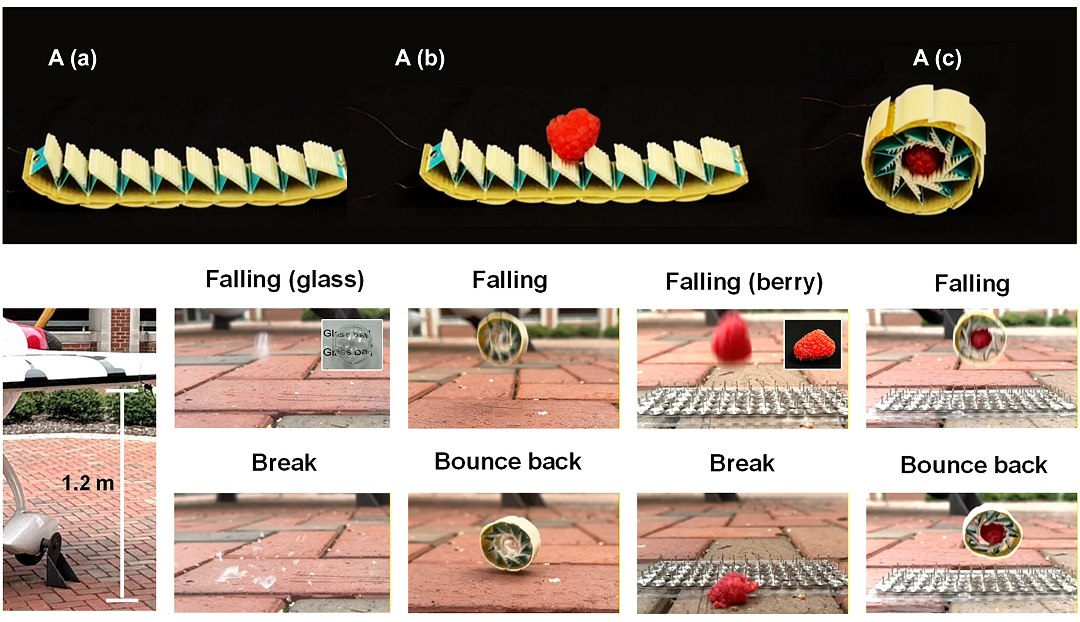
Os testes revelaram que, quanto maior o número de escamas segmentares no endoesqueleto, melhores são a rigidez e a resistência internas da estrutura.
"Por meio de um projeto guiado pela mecânica, estabelecemos um efeito de compensação entre a segmentação do endoesqueleto e a redução do peso estrutural," disse Zhu. "Por exemplo, 10 escamas segmentares foram capazes de suportar cerca de 10 newtons de força."
"Demonstramos uma combinação de flexibilidade e proteção mecânica que tem muito potencial e estamos abertos a colaborações de quem estiver interessado em explorar possíveis aplicações," finalizou o pesquisador.
Artigo: Armadillo-Inspired Active Morphing Skeletons for Soft Machines
Autores: Jianyu Zhou, Weixin Zhou, Seol-Yee (Jennifer) Lee, Shuang Wu, Ali Akbari, Yong Zhu
Revista: Science Advances
Vol.: 12, Issue 22
DOI: 10.1126/sciadv.aed2516




Aleatoriedade perfeita é alcançada pela primeira vez
Dissipador de cobre otimizado derruba consumo de energia dos computadores
Menor energia já medida permitirá contar fótons um por um
Novo tipo de magnetismo dá impulso definitivo à computação magnética
Computador quântico de luz tritura recorde de velocidade
Nova técnica reprograma a matéria rearranjando rapidamente seus átomos
Computador alternativo de silício resolve problemas intratáveis hoje
Mágnons: Quasipartícula abre caminho para miniaturizar computadores quânticos
Superinox: O aço que pode viabilizar Economia do Hidrogênio
Como levantar 2.500 toneladas sem precisar de um guindaste
Sensor de luz para robôs médicos surpreende e irá para indústria e automação
Músculo artificial inteligente integra sensibilidade e movimento
Como criar robôs inteligentes como os da ficção científica?
Internet corporal conecta dispositivos médicos ingeríveis e melhora exames
Materiais inertes aprendem a mudar de forma e se movimentam
Placas magnéticas abrem em sequência e absorvem 30% mais energia
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.