Exorroupa veste melhor que exoesqueleto
Redação do Site Inovação Tecnológica - 11/10/2018
[Imagem: Harvard Biodesign Lab]
Roupa para reforçar o movimento
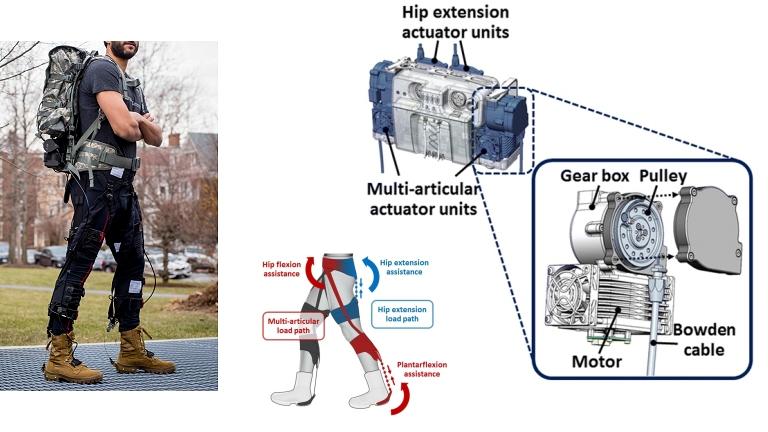
Com o advento das roupas eletrônicas, uma exorroupa flexível pode ser tão eficiente quanto um exoesqueleto rígido, mas é muito mais confortável.
A roupa para reforço de movimentos é um sistema multi-articular flexível, montado com componentes têxteis ligados à cintura, coxas e panturrilhas, que guiam as forças mecânicas de um sistema de motorização e atuação instalado em uma mochila.
Os movimentos chegam a cada seção da roupa por meio de cabos, ligados às articulações e ao quadril. Um sistema de sensores otimiza a força transmitida a cada cabo para dosar o nível de auxílio ao usuário.
Roupa robótica sob medida
Outra novidade dessa roupa robótica é um novo método de ajuste capaz de personalizar os efeitos da exorroupa para o ritmo e modo de andar específicos de cada usuário.
Quando o usuário começa a andar, o sistema mede a potência dos seus movimentos e gradualmente ajusta os parâmetros do controlador até encontrar aqueles que maximizam os efeitos da exorroupa com base na mecânica individual da marcha do usuário. Isso permitiu eliminar uma série de circuitos para lidar com medições de energia para se obter os mesmos resultados.
"Avaliamos os parâmetros metabólicos em sete voluntários com exorroupas que foram submetidos ao processo de ajuste e constatamos que o método reduziu o custo metabólico da caminhada em cerca de 14,8% em comparação com andar sem o dispositivo e cerca de 22% em comparação com andar com o dispositivo sem energia," disse Sangjun Lee, do Laboratório de Biodesign da Universidade de Harvard, nos EUA.
Entre os objetivos da equipe está o ajuste do equipamento para necessidades específicas, como trabalhadores da construção civil e da indústria.
Artigo: Autonomous multi-joint soft exosuit with augmentation-power-based control parameter tuning reduces energy cost of loaded walking
Autores: Sangjun Lee, Jinsoo Kim, Lauren Baker, Andrew Long, Nikos Karavas, Nicolas Menard, Ignacio Galiana, Conor J. Walsh
Revista: Journal of NeuroEngineering and Rehabilitation
Vol.: 15 (1)
DOI: 10.1186/s12984-018-0410-y






Novo reator transforma CO2 e eletricidade limpa em metano renovável
Miniaturização por encolhimento cria dispositivos que computam com luz
Hidrogênio poderá ser coletado por mineração, com custo mínimo
Dissipador de cobre otimizado derruba consumo de energia dos computadores
Computador quântico de luz tritura recorde de velocidade
Cola reversível ganha versão elétrica e substitui solda
Novo tipo de magnetismo dá impulso definitivo à computação magnética
Nova técnica reprograma a matéria rearranjando rapidamente seus átomos
Mágnons: Quasipartícula abre caminho para miniaturizar computadores quânticos
Como levantar 2.500 toneladas sem precisar de um guindaste
Como criar robôs inteligentes como os da ficção científica?
Processador biológico-eletrônico usa células cerebrais vivas para computação
Chips cerebrais vão se dissolver depois de fazerem seu trabalho
Material tem rigidez alterada remotamente por ondas sonoras
Implante neural menor que um grão de sal consegue ler seu cérebro
Lavar frutas e verduras na banheira? É quase isso, só que melhor
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.