Inseto robótico com neurônios artificiais anda como inseto de verdade
Redação do Site Inovação Tecnológica - 05/06/2020
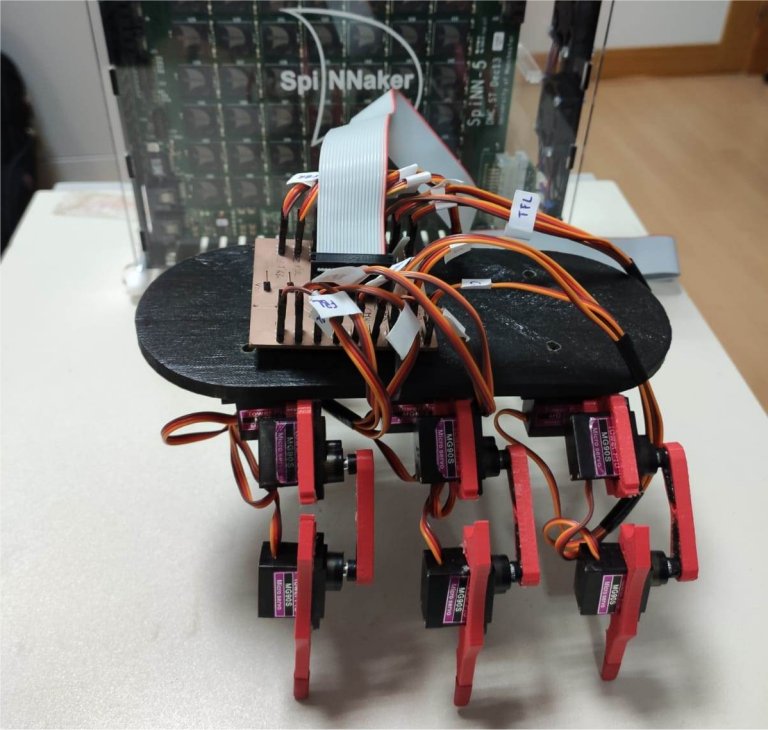
[Imagem: Daniel Gutierrez-Galan et al. - 10.1016/j.neucom.2019.11.007]
Inseto robótico
Pesquisadores espanhóis criaram um robô biomimético capaz de reproduzir todo o movimento de um inseto, incluindo andar, trotar e correr, de forma e velocidade naturais - nada de ter que acelerar a câmera para ver a coisa funcionar.
O robô, batizado de NeuroPod, apresenta uma perda insignificante de equilíbrio e apenas pequenos retardos intermediários entre os passos.
E ele funciona quase como um ser vivo real, replicando movimentos reais em resposta a estímulos externos, o que minimiza o consumo de energia e reduz o tempo de computação.
Outra grande novidade é que o robô é controlado por um processador neuromórfico, projetado e construído com inspiração no cérebro.
Controle neural
O sistema usa apenas 30 neurônios artificiais, um hardware menor do que outros modelos similares, mas com um software capaz de modelar toda a atividade de movimento de um inseto.
Na verdade ele é capaz de mais do que isso. Daniel Gutierrez e seus colegas das universidades de Sevilha e Cádiz afirmam que o sistema já permite a adição de sensores auditivos e visuais. Dessa maneira, o robô logo poderá responder a sons ou imagens específicas para modificar automaticamente seu padrão de movimento.
Não foi necessário construir o cérebro do inseto. O NeuroPod usa um processador neuromórfico SpiNNaker, que uma equipe da Universidade de Manchester, no Reino Unido, vem desenvolvendo há vários anos. Mas a equipe espanhola inovou com uma rede neural pulsada que não gera retardos na transmissão de informações, o que permitiu gerar o movimento do robô com uma latência muito próxima de zero.
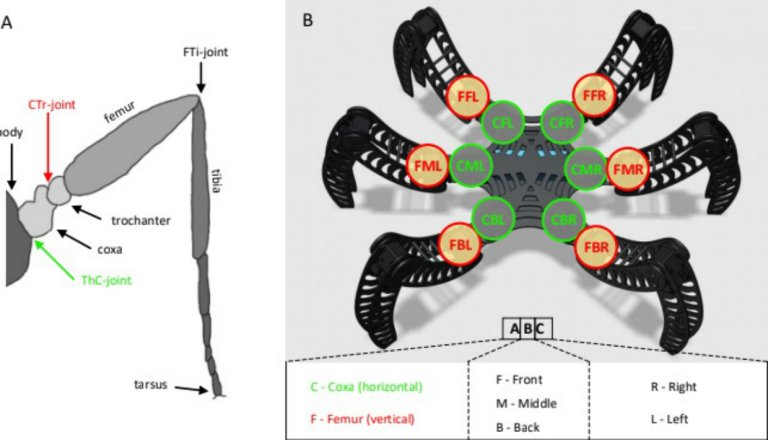
[Imagem: Daniel Gutierrez-Galan et al. - 10.1016/j.neucom.2019.11.007]
Esqueleto e sistemas
O esqueleto do robô foi criado por impressão 3D e contém 18 servomotores, que simulam os sistemas nervoso e motor. Um decodificador converte o movimento mecânico em pulsos digitais, que são interpretados pelo controlador de movimento neuromórfico.
Assim como em um animal, onde a medula espinhal cria padrões de movimento - como os produzidos ao respirar, correr ou nadar - o robô contém um "Gerador Central de Padrões" que distribui comandos de mudança de marcha para os diferentes sistemas, que por sua vez reagem modificando a velocidade ou intensidade da ação específica imediatamente. Dessa maneira, novos movimentos rítmicos são criados em resposta a um estímulo específico, sem retardos.
Artigo: Neuropod: A real-time neuromorphic spiking CPG applied to robotics
Autores: Daniel Gutierrez-Galan, Juan P. Dominguez-Morales, Fernando Perez-Peña, Angel Jimenez-Fernandez, Alejandro Linares-Barranco
Revista: Neurocomputing
DOI: 10.1016/j.neucom.2019.11.007






Novo reator transforma CO2 e eletricidade limpa em metano renovável
Miniaturização por encolhimento cria dispositivos que computam com luz
Hidrogênio poderá ser coletado por mineração, com custo mínimo
Dissipador de cobre otimizado derruba consumo de energia dos computadores
Computador quântico de luz tritura recorde de velocidade
Novo tipo de magnetismo dá impulso definitivo à computação magnética
Nova técnica reprograma a matéria rearranjando rapidamente seus átomos
Computador alternativo de silício resolve problemas intratáveis hoje
Mágnons: Quasipartícula abre caminho para miniaturizar computadores quânticos
Como levantar 2.500 toneladas sem precisar de um guindaste
Tatus inspiram tecnologia para proteção de máquinas delicadas
Sensor de luz para robôs médicos surpreende e irá para indústria e automação
Músculo artificial inteligente integra sensibilidade e movimento
Como criar robôs inteligentes como os da ficção científica?
Internet corporal conecta dispositivos médicos ingeríveis e melhora exames
Materiais inertes aprendem a mudar de forma e se movimentam
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.