Luva eletrônica dá aos robôs um pouco mais de tato
Redação do Site Inovação Tecnológica - 17/01/2019
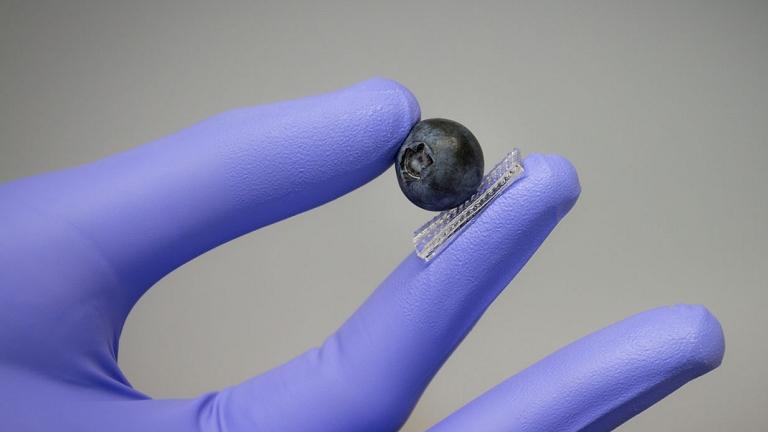
[Imagem: Zhenan Bao Lab]
Pele eletrônica
Um sensor inspirado na pele humana foi projetado para equipar luvas eletrônicas que possam dar aos robôs um pouco mais de tato.
Ele funcionou bem o suficiente para permitir que uma mão robótica tocasse uma fruta delicada e manuseasse uma bola de pingue-pongue sem esmagar nenhuma delas.
"Esta tecnologia nos coloca no caminho para um dia dar aos robôs o tipo de capacidade de detecção encontrada na pele humana," disse a professora Zhenan Bao, da Universidade de Stanford, nos EUA, que vem trabalhando em peles artificiais e em nervos artificiais há algum tempo.
Os sensores nas pontas dos dedos da luva medem simultaneamente a intensidade e a direção da pressão, duas qualidades essenciais para tentar equiparar a destreza manual humana.
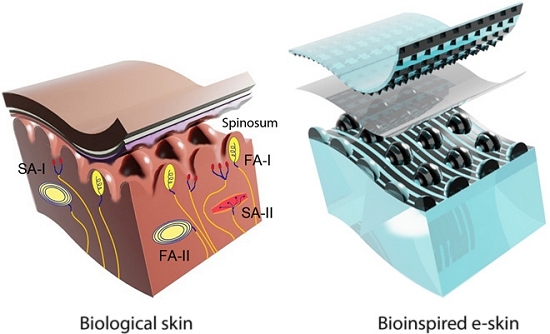
[Imagem: Clementine M. Boutry et al. - 10.1126/scirobotics.aau6914]
Tato robótico
Para tentar imitar o tato humano, cada sensor é feito de três camadas flexíveis que funcionam em conjunto. As camadas superior e inferior são eletricamente ativas, dotadas de grades de linhas elétricas. Postas perpendicularmente, cria-se uma série densa de pequenos "píxeis" sensores.
O isolador de borracha no meio mantém as camadas superior e inferior dos eletrodos afastadas. Mas essa separação é crítica, porque os eletrodos podem então armazenar energia elétrica. Quando o dedo robótico recebe uma pressão, a aproximação dos eletrodos eleva a energia armazenada, que pode ser monitorada.
Colinas e vales cuidadosamente traçados na camada inferior, para imitar as calosidades da pele humana, fornecem uma maneira de mapear a intensidade e a direção da pressão para pontos específicos nas grades perpendiculares, muito parecido com o estrato espinhoso, uma camada da epiderme humana.
A professora Bao afirma que, com a programação adequada, uma mão robótica usando esses sensores sensíveis ao toque poderia executar uma tarefa repetitiva, como retirar ovos de uma esteira e colocá-los nas caixas. A tecnologia também poderá ter aplicações em cirurgia assistida por robôs, onde o controle preciso do toque é essencial.
Mas ela ressalta que seu objetivo último é desenvolver uma versão avançada da luva que aplique automaticamente a quantidade certa de força para manipular um objeto com segurança, sem qualquer programação prévia.
Artigo: A hierarchically patterned, bioinspired e-skin able to detect the direction of applied pressure for robotics
Autores: Clementine M. Boutry, Marc Negre, Mikael Jord, Orestis Vardoulis, Alex Chortos, Oussama Khatib, Zhenan Bao
Revista: Science Robotics
Vol.: 3, Issue 24, eaau6914
DOI: 10.1126/scirobotics.aau6914





Novo reator transforma CO2 e eletricidade limpa em metano renovável
Cola reversível ganha versão elétrica e substitui solda
Miniaturização por encolhimento cria dispositivos que computam com luz
Hidrogênio poderá ser coletado por mineração, com custo mínimo
Computador quântico de luz tritura recorde de velocidade
Dissipador de cobre otimizado derruba consumo de energia dos computadores
Novo tipo de magnetismo dá impulso definitivo à computação magnética
Nova técnica reprograma a matéria rearranjando rapidamente seus átomos
Mágnons: Quasipartícula abre caminho para miniaturizar computadores quânticos
Como levantar 2.500 toneladas sem precisar de um guindaste
Sensor de luz para robôs médicos surpreende e irá para indústria e automação
Músculo artificial inteligente integra sensibilidade e movimento
Detector inédito vai capturar partículas que não interagem com quase nada
Esta nova câmera captura eventos que duram um trilionésimo de segundo
Revolução na espectrometria: De umas poucas para bilhões de moléculas analisadas simultaneamente
Implante neural menor que um grão de sal consegue ler seu cérebro
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.