Robô água-viva usa músculos artificiais alimentados a hidrogênio
Redação do Site Inovação Tecnológica - 22/03/2012
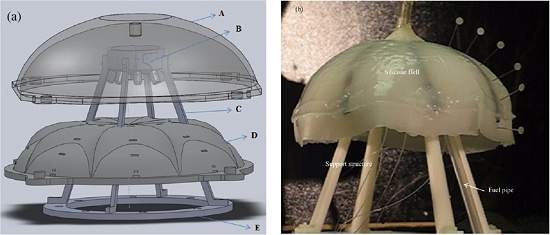
[Imagem: Tadesse et al./IOP]
Robô geleia
Pesquisadores norte-americanos criaram uma água-viva robô que se movimenta suavemente, impulsionada por músculos artificiais alimentados por hidrogênio.
Em tese, o robô pode se movimentar indefinidamente, sem nunca ficar sem combustível, uma vez ela retira o hidrogênio de reações químicas que ocorrem em sua superfície - ele ainda não é capaz de fazer isto.
"Pelo que sabemos, esta é a primeira vez que um robô subaquático é alimentado usando hidrogênio externo como fonte de combustível," disse Yonas Tadesse, da Universidade Virgínia Tech, nos Estados Unidos, criador do robô.
O robô, que vem sendo desenvolvido desde 2009, foi adequadamente batizado do Robojelly, ou robô-geleia - jellyfish é o termo em inglês para água-viva.
A água-viva serviu de inspiração para um veículo subaquático devido à simplicidade e eficiência do seu sistema de movimentação, abrindo-se e ejetando a água, o que pode ser muito eficaz quando se trata de observar outras formas de vida no oceano.
Músculos artificiais a hidrogênio
O movimento do robô é feito por músculos artificiais circulares instalados abaixo do seu corpo, feito de silicone, como se fossem as varetas metálicas de um guarda-chuva.
Quando os músculos se contraem, o corpo se fecha, ejetando a água em um sentido e impulsionando o robô no outro.
Quando o estímulo é retirado dos músculos artificiais, estes se contraem, fazendo com que o robô volte ao seu formato original, estando pronto para o próximo impulso.
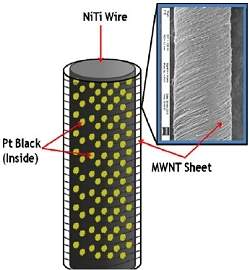
[Imagem: Tadesse et al./IOP]
O músculo artificial alimentado a hidrogênio consiste em um músculo artificial normal, do tipo SMA, feito de uma liga de níquel e titânio (NiTi), recoberto por uma folha de nanotubos de carbono e nanopartículas de platina.
O oxigênio e o hidrogênio na água reagem com platina, uma reação química que libera calor.
Os nanotubos de carbono servem tanto para levar o hidrogênio até o catalisador de platina, quanto para ajudar a conduzir o calor gerado pela reação até os músculos artificiais, fazendo-os assumir os diversos formatos necessários ao movimento.
Sem potência
A grande vantagem do conceito é que o robô não precisa de baterias e nem de reabastecimento. Tudo o que é necessário é que ele fique dentro d'água para se movimentar.
O primeiro protótipo não é muito eficiente e, apesar de "encenar" adequadamente, o hidrogênio que chega aos músculos artificiais não gera uma potência suficiente para fazê-lo sair do lugar.
Mas a capacidade de movimento foi demonstrada alimentando os músculos artificiais com uma fonte externa de eletricidade.
"Nós agora estamos procurando novas maneiras de levar o hidrogênio a cada segmento, para que cada um possa ser controlado individualmente. Isso deverá permitir que o robô seja controlado e se mova em diferentes direções," disse Tadesse.
Artigo: Hydrogen-fuel-powered bell segments of biomimetic jellyfish
Autores: Yonas Tadesse, Alex Villanueva, Carter Haines, David Novitski, Ray Baughman, Shashank Priya
Revista: Smart Materials and Structures
Vol.: 21 045013
DOI: 10.1088/0964-1726/21/4/045013





Partículas emaranhadas criam materiais multifuncionais fortes e desmontáveis
Ampulheta de grafeno cria qubits robustos para computação quântica
Cristais de espaço-tempo podem criar buracos negros microscópicos
Luz funciona como freio, imitando um atrito físico
Matemáticos provam que energia escura é um erro de interpretação
Reator solar recicla plástico e produz hidrogênio limpo
Relógio quântico de pêndulo supera limites de precisão
Luz faz metais vibrarem 1 trilhão de vezes por segundo
Fotossíntese artificial fica autônoma e dispensa baterias
Computação quântica hiperdimensional é 500 vezes mais rápida
Nanorrobô imita foguete espacial, com módulos de propulsão e carga reutilizáveis
Robô omnidirecional aproxima-se da eficiência máxima possível
Tatus inspiram tecnologia para proteção de máquinas delicadas
Sensor de luz para robôs médicos surpreende e irá para indústria e automação
Músculo artificial inteligente integra sensibilidade e movimento
Como criar robôs inteligentes como os da ficção científica?
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.