Robô mais forte do mundo nasce de um chip
Redação do Site Inovação Tecnológica - 09/07/2010
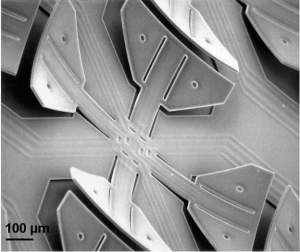
[Imagem: John Suh/Stanford University]
Microrrobôs
O projeto grandioso do Dr. Karl Bohringer, da Universidade de Washington, nos Estados Unidos, contrasta fortemente com os instrumentos que ele pretende usar para realizá-lo.
O pesquisador vislumbra que, em um futuro próximo, milhares de robôs microscópicos, ou microrrobôs, poderão ser atirados de um avião ou de um helicóptero e, ao cair no chão, começarem a desempenhar sozinhos a tarefa para a qual foram projetados.
Entre essas tarefas estão explorar estruturas e regiões assoladas por desastres naturais, coletar dados e analisar amostras do meio ambiente, ou fazer qualquer outra tarefa onde as pequenas dimensões sejam uma vantagem.
"Quinhentopeia"
Para exemplificar o conceito, Bohringer e sua equipe construíram robôs que pesam meio grama, medem apenas alguns centímetros de comprimento e têm a espessura equivalente à de uma unha.
Os nada menos que 512 pés, dispostos quatro a quatro para formar 128 conjuntos, permitem que os microrrobôs movimentem-se em qualquer direção, sobre terrenos totalmente irregulares.
Os microrrobôs estão também entre os mais fortes já construídos: cada um deles é capaz de carregar o equivalente a sete vezes o seu próprio peso, o que pode ser usado tanto para levar cargas para locais pré-determinados, quanto para recolher amostras do meio ambiente.
Pernas super rápidas

[Imagem: University of Washington]
O grande avanço está justamente na disposição e na estrutura de movimentação das pernas dessa centopeia robótica. Cada perna é feita com um fio metálico ensanduichado entre dois materiais com coeficientes de expansão termal diferentes - sob calor, um deles se expande mais do que o outro.
Quando uma corrente elétrica passa através da perna do robô, o fio aquece os dois materiais. Como um dos lados se expande mais do que o outro, isto faz a perna se curvar para um dos lados. A desligar a energia, a perna retorna à sua posição original.
A área superficial das pernas é tão grande em comparação com seu volume que elas podem aquecer ou esfriar em apenas 20 milissegundos.
Os conjuntos com centenas de pernas, alimentadas sequencialmente, podem repetir o movimento de 20 a 30 vezes por segundo.
"O tempo de resposta é um ponto interessante nesses robôs minúsculos," explica Bohringer. "No seu forno, pode levar dezenas de minutos para aquecer algo. Mas nesta pequena escala, o aquecimento é muito, muito mais rápido."
Robô-chip
O microrrobô do Dr. Bohringer tem uma longa história. Ele nasceu como um chip para a fabricação de escâneres de imagem e impressoras muito finas. Logo depois ele foi adaptado para ser usado em satélites artificiais.
Agora o que os pesquisadores fizeram foi virá-lo de cabeça para baixo e transformar seus pinos de conexão em pernas, criando um robô parecido com uma centopeia, só que muito mais rápido e muito mais forte.
"É um dos mais fortes atuadores que você pode obter em pequena escala, e ele tem uma das maiores amplitudes de movimentação," conta Bohringer. "Isto é difícil de obter nessa escala."
Artigo: Thermally Actuated Omnidirectional Walking Microrobot
Autores: Erdem, E.Y., Yu-Ming Chen, Mohebbi, M., Suh, J.W., Kovacs, G., Darling, R.B., Bohringer, K.F.
Revista: Journal of Microelectromechanical Systems
Data: June 2010
Vol.: 19 Issue:3 pp 433-442





Partículas emaranhadas criam materiais multifuncionais fortes e desmontáveis
Ampulheta de grafeno cria qubits robustos para computação quântica
Cristais de espaço-tempo podem criar buracos negros microscópicos
Luz funciona como freio, imitando um atrito físico
Matemáticos provam que energia escura é um erro de interpretação
Reator solar recicla plástico e produz hidrogênio limpo
Relógio quântico de pêndulo supera limites de precisão
Luz faz metais vibrarem 1 trilhão de vezes por segundo
Fotossíntese artificial fica autônoma e dispensa baterias
Computação quântica hiperdimensional é 500 vezes mais rápida
Nanorrobô imita foguete espacial, com módulos de propulsão e carga reutilizáveis
Músculo artificial amplifica movimento e memoriza toque
Filme plástico com nanotecnologia destrói vírus por contato
Luz manipula a matéria de maneiras inesperadas
Micro e nanofabricação 3D de última geração agora de qualquer material
Descoberta nova forma de atrito que contradiz lei da física de 300 anos
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.