Robôs moles inspirados em lesmas - mas pode colocar no bolso sem nojo
Redação do Site Inovação Tecnológica - 16/12/2019
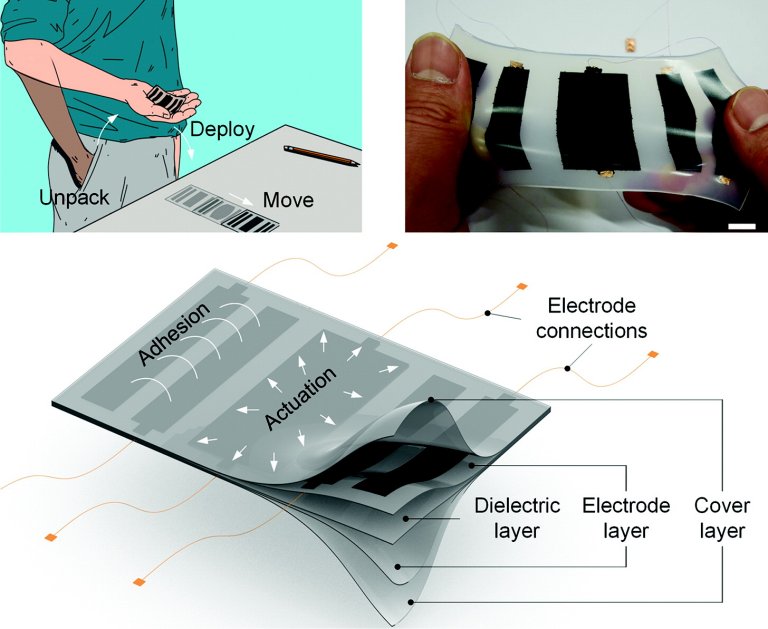
[Imagem: Jonathan Rossiter]
Eletropele
Usando uma nova maneira de incorporar músculos artificiais e eletroadesão em materiais macios, pesquisadores estão criando mecanismos robóticos elásticos semelhantes à pele que podem ser enrolados e até colocados no bolso sem perder a funcionalidade.
Esse material ativo pode ser usado em interfaces homem-máquina, garras de robôs para objetos delicados, novas tecnologias de vestir e mesmo robôs finos e leves para monitoramento em ambientes perigosos.
Até agora, os robôs flexíveis exigiam mecanismos separados para fornecer suas habilidades de movimento e suas capacidades de se agarrar à superfície em que se movem.
Inspirando-se em peles biológicas e organismos moles, como caracóis e lesmas, Jianglong Guo, da Universidade de Bristol, criou uma pele robótica, que ele batizou de "eletropele" (ElectroSkin), que se arrasta pela superfície, contraindo alternadamente músculos artificiais incorporados e agarrando-se à superfície usando cargas elétricas.
Robôs bioinspirados
Um robô feito com a ElectroSkin pode ser amassado, colocado no bolso e depois retirado e jogado em uma superfície, que ele começa a se mover como se estivesse sendo tratado delicadamente, como seus parentes anteriores exigem.
A ideia de longo prazo da equipe é que esses robôs possam rastejar pelas paredes e pelo teto para limpá-las, explorar ambientes difíceis de alcançar, incluindo prédios desmoronados, e serem usados em vários dispositivos vestíveis, formando uma segunda pele sensorial e ativa.
"A ElectroSkin é um passo importante em direção a robôs macios que podem ser facilmente transportados, lançados e até vestidos. A combinação de músculos artificiais elétricos e agarre elétrico replicou os movimentos de animais como lesmas e caracóis; onde esses animais podem ir, nossos robôs também podem!" disse o professor Jonathan Rossiter, coordenador da equipe.
Artigo: All-Soft Skin-Like Structures for Robotic Locomotion and Transportation
Autores: Jianglong Guo, Chaoqun Xiang, Andrew Conn, Jonathan Rossiter
Revista: Soft Robotics
DOI: 10.1089/soro.2019.0059





Novo reator transforma CO2 e eletricidade limpa em metano renovável
Miniaturização por encolhimento cria dispositivos que computam com luz
Cola reversível ganha versão elétrica e substitui solda
Hidrogênio poderá ser coletado por mineração, com custo mínimo
Computador quântico de luz tritura recorde de velocidade
Dissipador de cobre otimizado derruba consumo de energia dos computadores
Novo tipo de magnetismo dá impulso definitivo à computação magnética
Nova técnica reprograma a matéria rearranjando rapidamente seus átomos
Mágnons: Quasipartícula abre caminho para miniaturizar computadores quânticos
Como levantar 2.500 toneladas sem precisar de um guindaste
Tatus inspiram tecnologia para proteção de máquinas delicadas
Sensor de luz para robôs médicos surpreende e irá para indústria e automação
Músculo artificial inteligente integra sensibilidade e movimento
Como criar robôs inteligentes como os da ficção científica?
Internet corporal conecta dispositivos médicos ingeríveis e melhora exames
Materiais inertes aprendem a mudar de forma e se movimentam
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.