Seda de aranha funciona naturalmente como músculo robótico
Redação do Site Inovação Tecnológica - 17/04/2019
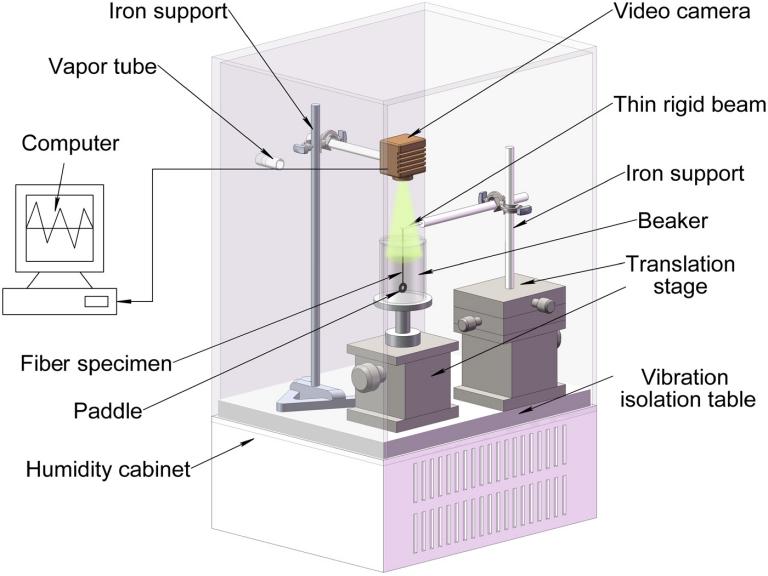
[Imagem: Dabiao Liu et al. - 10.1126/sciadv.aau9183]
Músculo para robôs
Os robôs moles logo poderão contar com músculos artificiais sem perder sua biocompatibilidade e sua vocação de operar em conjunto com o corpo humano - e dentro dele.
Em 2017, uma equipe da China descobriu que a seda de aranha pode funcionar como um músculo artificial graças à reação da seda com a água - ou com a umidade do ar.
Agora, Dabiao Liu, do MIT, descobriu que a seda de aranha não apenas se contrai e distende em reação à umidade, como ela também se contorce, fornecendo uma forte força de torção, um fenômeno que ninguém havia descrito até então.
"Nós descobrimos isso por acidente inicialmente," disse Liu. "Meus colegas e eu queríamos estudar a influência da umidade na seda da aranha." Para fazer isso, eles suspenderam um peso em um fio de seda, para fazer uma espécie de pêndulo, e colocaram o aparato em uma câmara onde podiam controlar a umidade relativa do ar. "Quando aumentamos a umidade, o pêndulo começou a girar. Estava fora da nossa expectativa. Isso realmente me impressionou."
Força das proteínas
A equipe ainda não sabe qual é a utilidade dessa força torsional para as aranhas, mas já descobriram como ela opera: O mecanismo é baseado no dobramento de um segmento de proteína chamada prolina.
"A seda dragline [fio de segurança] da aranha é uma fibra de proteína," explica Liu. "Ela é feita de duas proteínas principais, chamadas MaSp1 e MaSp2. A prolina, crucial para a reação de torção, é encontrada dentro do MaSp2, e quando moléculas de água interagem com ela, elas interrompem suas ligações de hidrogênio de uma maneira assimétrica que causa a rotação. A rotação só ocorre em uma direção e ocorre em um limiar de cerca de 70% de umidade relativa."
Embora o mecanismo permita que as sedas de aranha sejam diretamente usadas como músculos artificiais em robôs biodegradáveis e biocompatíveis, a equipe pretende replicar o mecanismo em materiais sintéticos, que possam ser mais resistentes às intempéries do que um material à base de proteínas, que é facilmente degradável. Se conseguirem, isso criará uma nova classe de músculos artificiais de amplo uso.
Os músculos artificiais mais conhecidos são feitos de uma liga de níquel e titânio, conhecida como nitinol, embora vários polímeros eletroativos estejam ampliando o espaço desses atuadores.
Artigo: Spider dragline silk as torsional actuator driven by humidity
Autores: Dabiao Liu, Anna Tarakanova, Claire C. Hsu, Miao Yu, Shimin Zheng, Longteng Yu, Jie Liu, Yuming He, D. J. Dunstan, Markus J. Buehler
Revista: Science Advances
Vol.: 5, no. 3, eaau9183
DOI: 10.1126/sciadv.aau9183





Novo reator transforma CO2 e eletricidade limpa em metano renovável
Miniaturização por encolhimento cria dispositivos que computam com luz
Hidrogênio poderá ser coletado por mineração, com custo mínimo
Dissipador de cobre otimizado derruba consumo de energia dos computadores
Computador quântico de luz tritura recorde de velocidade
Cola reversível ganha versão elétrica e substitui solda
Novo tipo de magnetismo dá impulso definitivo à computação magnética
Nova técnica reprograma a matéria rearranjando rapidamente seus átomos
Mágnons: Quasipartícula abre caminho para miniaturizar computadores quânticos
Como levantar 2.500 toneladas sem precisar de um guindaste
Tatus inspiram tecnologia para proteção de máquinas delicadas
Músculo artificial inteligente integra sensibilidade e movimento
Esta bomba bombeia sem motor, sem barulho e sem lubrificante
Material tem rigidez alterada remotamente por ondas sonoras
Materiais inertes aprendem a mudar de forma e se movimentam
Motores elétricos se organizam sozinhos em rede, imitando músculos reais
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.