Sensor artificial imita sentido humano do tato
Redação do Site Inovação Tecnológica - 20/11/2018
[Imagem: Kwonsik Shin et al. - 10.1109/TMECH.2018.2870917]
Sensor tátil
Esse sensor tátil artificial imita a capacidade da pele humana de detectar informações de superfície, incluindo formas, padrões e texturas.
Isso é importante para tornar os dispositivos eletrônicos e robôs capazes de perceber sensações como aspereza e maciez.
"Imitar os sentidos humanos é uma das áreas mais populares da engenharia, mas o sentido do tato é notoriamente difícil de replicar," disse Kwonsik Shin, do Instituto de Ciência e Tecnologia Daegu Gyeongbuk, na Coreia do Sul.
Os seres humanos detectam simultaneamente múltiplas características do ambiente, como pressão, temperatura, vibração, tensão e força de cisalhamento. Mas não é só isso: também detectamos parâmetros "psicológicos", como rugosidade, maciez, dureza e dor.
Assim, detectar informações das superfícies é um primeiro passo crucial para replicar as sensações psicológicas do toque e construir dispositivos biomiméticos que as imitem.
[Imagem: Kwonsik Shin et al. - 10.1109/TMECH.2018.2870917]
Sensor piezoelétrico
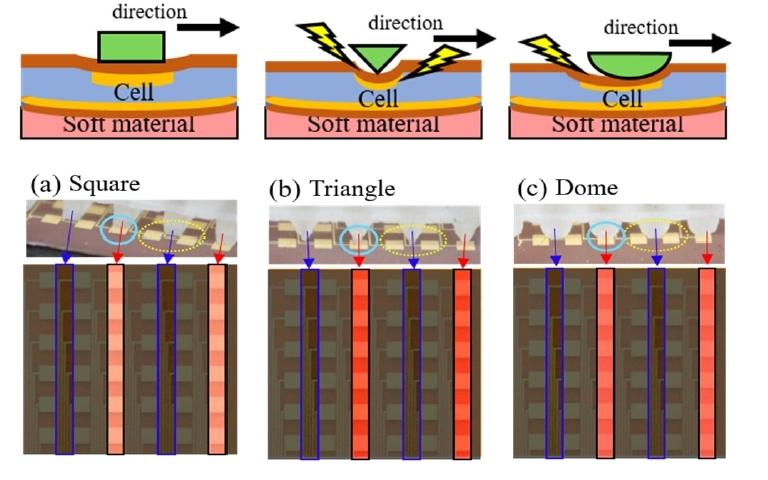
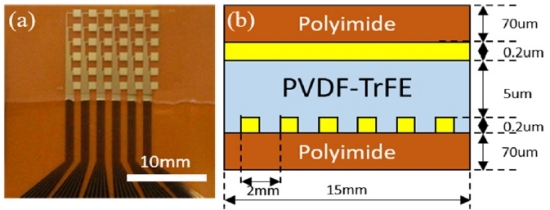
Para enfrentar esse desafio, Kwonsik Shin desenvolveu um sensor usando materiais piezoelétricos, materiais altamente sensíveis que geram energia elétrica em resposta a uma força que lhes é aplicada - e podem ser forças muito suaves.
Com isto, o novo sensor pode detectar sinais através de toque e do deslizamento. Isso imita as duas maneiras pelas quais os humanos percebem as características da superfície: cutucando-a ou passando os dedos sobre ela. A maioria dos sensores artificiais usa só um desses métodos.
Além disso, como ele é formado por uma matriz de múltiplos receptores, é possível calcular a velocidade de deslizamento usando o intervalo de tempo entre os sinais de dois receptores e a distância entre eles.
No futuro, o sensor poderá ser incorporado em dispositivos eletrônicos, robôs e até celulares, para melhorar sua capacidade de diferenciar toques ou saber se ele está na sua mão ou sobre uma mesa, por exemplo.
Antes disso, porém, o sensor deverá ser capaz de distinguir perfeitamente as formas em 3D, o que ainda não é possível com esta versão.
Artigo: Artificial Tactile Sensor Structure for Surface Topography through Sliding
Autores: Kwonsik Shin, Minkyung Sim, Eunmin Choi, Hyunchul Park, Ji-Woong Choi, Yuljae Cho, Jung Inn Sohn, Seung Nam Cha, Jae Eun Jang
Revista: Transactions on Mechatronics
DOI: 10.1109/TMECH.2018.2870917






Transferência de calor é amplificada por material artificial
Bateria inédita armazena hidrogênio ou eletricidade
Dessalinização solar não gera salmoura e extrai lítio para baterias
Computador probabilístico é fabricado com tecnologia de silício
Cola reversível ganha versão elétrica e substitui solda
Para descobrir novas leis da física, IA precisa desaprender teorias atuais
Detectada pela primeira vez atividade magnética em exoplanetas
Tecnologia pós-binária: Material magnético armazena quatro bits
Capacitor revolucionário usa água para armazenar eletricidade
Além dos fótons: Quasipartícula faz computação inteiramente com luz
Tecnologias macias e flexíveis eliminam barreira entre humanos e máquinas
Câmera Atômica: Um único átomo funciona como microscópio para ver a luz
Sensor de luz para robôs médicos surpreende e irá para indústria e automação
Músculo artificial inteligente integra sensibilidade e movimento
Detector inédito vai capturar partículas que não interagem com quase nada
Esta nova câmera captura eventos que duram um trilionésimo de segundo
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.