Equipamento melhora precisão do GPS nas cidades em 90%
Redação do Site Inovação Tecnológica - 13/02/2013
[Imagem: Martí et al./Sensors]
Fusão sensorial
Pesquisadores espanhóis criaram um sistema que melhora em até 90% a precisão com que os sinais de GPS podem ser utilizados para detectar a posição de um veículo na cidade.
A margem de erro dos aparelhos comerciais de GPS, como os utilizados para navegação em carros, é de 15 metros em campo aberto.
Entretanto, no ambiente real de uma cidade, a posição de um veículo pode ser deslocada em mais de 50 metros, devido à reflexão dos sinais dos satélites em prédios, árvores ou ruas estreitas.
Enrique Martí e seus colegas da Universidade Carlos III de Madri descobriram como eliminar esses erros e aumentar a precisão do GPS usando o que eles chamam de "fusão sensorial".
GPS com precisão
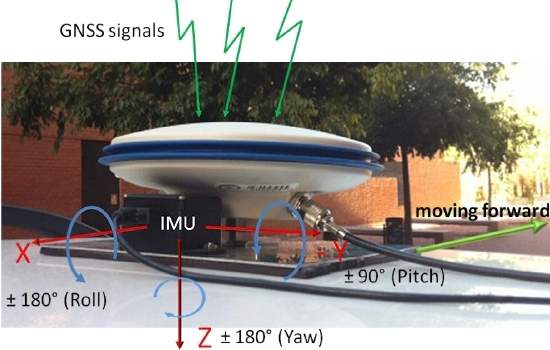
O sistema criado pelos pesquisadores espanhóis consiste de uma parte hardware - acelerômetro e giroscópio - e de uma parte software - um algoritmo para eliminar o "ruído" do sinal que chega ao aparelho de GPS.
Os sensores fazem parte de uma Unidade de Medição Inercial, um dispositivo de baixo custo já utilizado em diversos equipamentos e mesmo em automóveis.
Os sinais dessa Unidade de Medição Inercial, juntamente com os sinais do GPS, são enviados para processamento por um algoritmo que mescla os dados e corrige os erros nas coordenadas geográficas.
"Este software é baseado em uma arquitetura que utiliza informações de contexto e um poderoso algoritmo (chamado Filtro de Kalman "sem cheiro") que elimina os desvios instantâneos causados pela degradação dos sinais recebidos pelo receptor GPS ou pela perda total ou parcial [da conexão com os] satélites," explica Enrique Martí.
GPS multissensorial
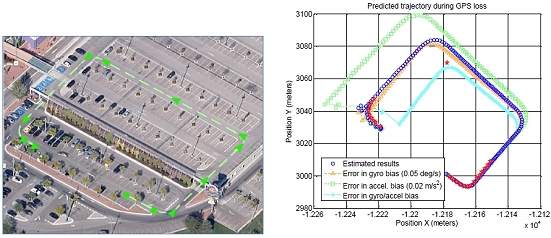
O aparelho já foi instalado em um veículo de testes, que permitiu a aferição de sua precisão.
[Imagem: Martí et al./Sensors]
"Nós conseguimos melhorar a determinação da posição de um veículo em casos críticos entre 50 e 90 por cento, dependendo do grau de degradação dos sinais e do tempo [de chegada dos sinais] que afeta a degradação no receptor GPS," disse Martín.
O próximo passo é portar o sistema para que ele possa faz uso dos sensores embutidos em smartphones, já que esses telefones inteligentes são equipadas com mais de 10 sensores, incluindo acelerômetro, giroscópio, magnetômetro, GPS e câmeras, além de Wi-Fi, Bluetooth ou GSM.
"Estamos agora começando a trabalhar na integração deste sistema de fusão de dados em um telefone celular," revelou Enrique Martí, "de modo que possamos integrar todas as medições feitas pelos seus sensores a fim de obter o mesmo resultado que obtivemos agora, mas a um custo muito mais baixo."
Carros sem motorista
Em certos casos, como em túneis, a comunicação dos aparelhos com os satélites é perdida, o que dificulta que as aplicações baseadas no GPS alcancem os chamados Sistemas de Transporte Inteligente, que exigem um alto nível de segurança.
"As futuras aplicações que se beneficiarão da tecnologia que estamos desenvolvendo incluem a condução cooperativa, manobras automáticas para a segurança dos pedestres, veículos autônomos e sistemas de alerta de colisão," afirmam os cientistas.
Os aparelhos de navegação atuais resolvem parcialmente o problema da imprecisão dos sinais de GPS usando os mapas e tentando colocar o veículo na localização mais provável a cada momento.
Mas isso não é suficiente para evitar que um veículo colida com outro ao mudar de faixa, ou cruze o sinal vermelho por ter calculado incorretamente a posição do semáforo - para isso, os erros não podem superar 1 ou 2 metros.
Artigo: Context-Aided Sensor Fusion for Enhanced Urban Navigation
Autores: Enrique David MartÃ, David Martin, Jesús GarcÃa, Arturo de la Escalera, José Manuel Molina, José MarÃa Armingol
Revista: Sensors
Vol.: 12 Número: 12 Páginas: 16802-16837
DOI: 10.3390/s121216802





Tatus inspiram tecnologia para proteção de máquinas delicadas
Propulsor híbrido químico-iônico acelera e barateia pequenos satélites
Transferência de calor é amplificada por material artificial
Para descobrir novas leis da física, IA precisa desaprender teorias atuais
Mágnons: Quasipartícula abre caminho para miniaturizar computadores quânticos
Computador probabilístico é fabricado com tecnologia de silício
Detectada pela primeira vez atividade magnética em exoplanetas
Tecnologia pós-binária: Material magnético armazena quatro bits
Capacitor revolucionário usa água para armazenar eletricidade
Além dos fótons: Quasipartícula faz computação inteiramente com luz
Estruturas de fibra de carbono igualam alumínio com 1/100 do peso
Película transparente esfria o carro sem gastar bateria ou combustível
Engenheiros tentam dar adeus à bigorna com nova tecnologia de soldagem
Maior fonte de poluição nas estradas não sai pelo escapamento
Fractais e metamateriais juntam-se para melhorar som automotivo
Eletricidade é gerada usando apenas silício e água
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.