Músculo artificial amplifica movimento e memoriza toque
Redação do Site Inovação Tecnológica - 24/06/2026
[Imagem: Seong-Yu Choi et al. - 10.1038/s41467-025-68225-y]
Instabilidade elastomagnética
Os atuadores flexíveis, entre eles os músculos artificiais, estão viabilizando a chamada robótica macia, mas também são altamente promissores para a área biomédica, das tecnologias assistivas aos robôs-cirurgiões.
Para que todas essas possibilidades virem realidade, contudo, é necessário vencer algumas limitações, como a força insuficiente para algumas aplicações, o deslocamento reduzido e um tempo de resposta lento.
Seong-Yu Choi e colegas da Universidade Nacional de Seul, na Coreia do Sul, apresentaram agora uma solução para vencer essas limitações: Um sistema mecânico capaz de amplificar o movimento e memorizar estímulos externos fazendo as membranas elásticas dos músculos artificiais interagirem com ímãs.
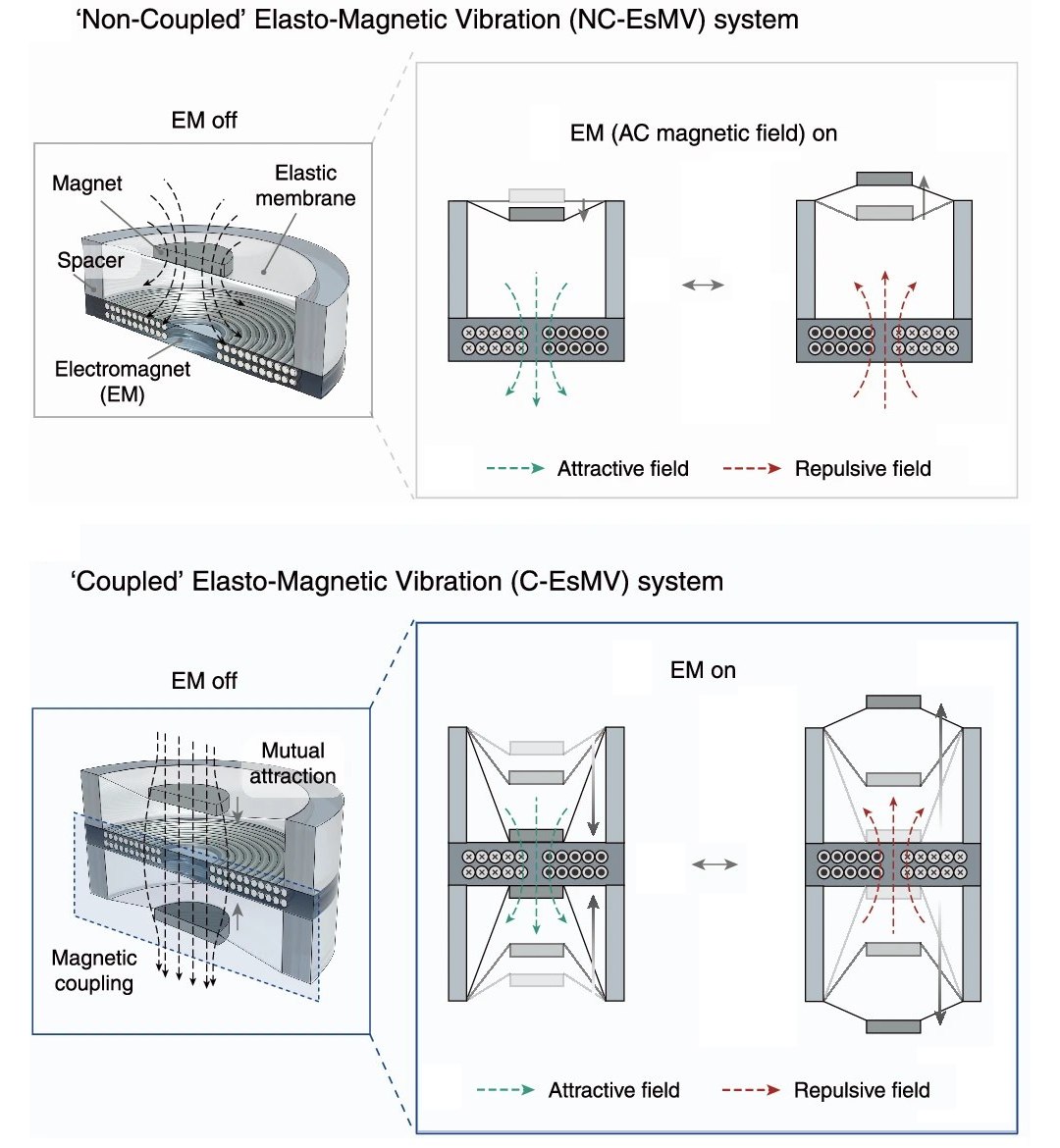
O que viabiliza essa nova família de atuadores flexíveis mais poderosos é um fenômeno chamado instabilidade elastomagnética, um mecanismo que acopla a atração do magnetismo com a força restauradora elástica.
[Imagem: Seong-Yu Choi et al. - 10.1038/s41467-025-68225-y]
Amplificador e memória mecânica
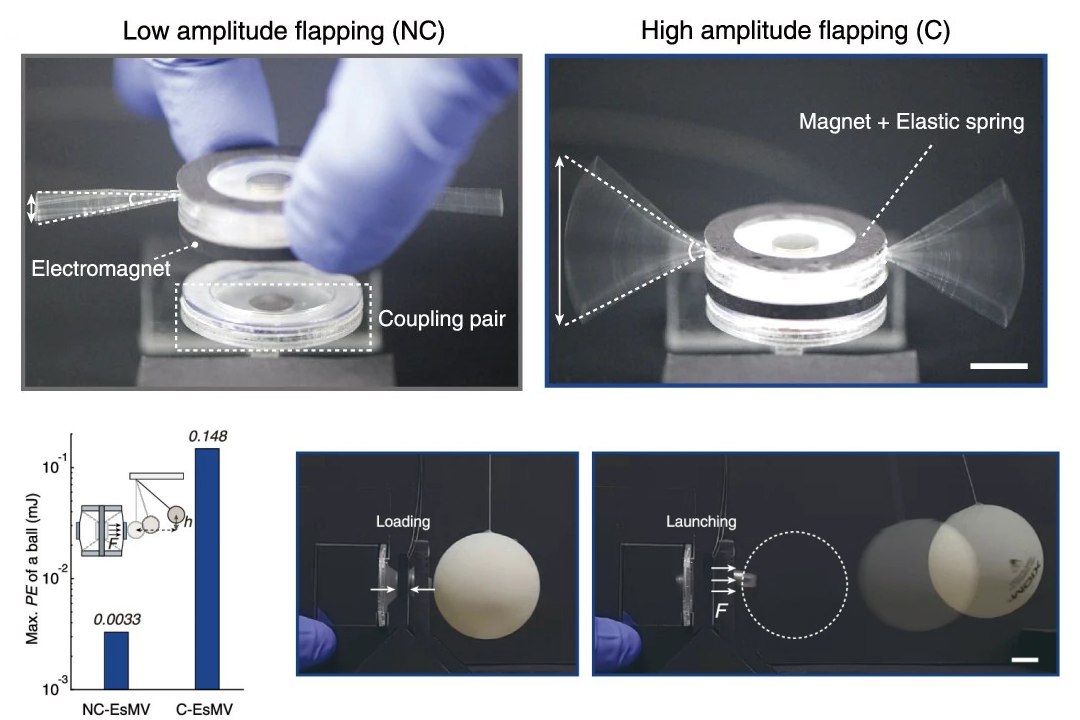
O resultado é um músculo artificial composto por ímãs permanentes, membranas elásticas e um eletroímã: Quando a atração magnética e a tensão elástica estão equilibradas, o sistema entra em um regime biestável, permitindo a alternância entre dois estados mecânicos estáveis.
Basta então um pequeno estímulo elétrico para desencadear uma transição repentina, convertendo a energia elástica armazenada em movimento amplo e rápido. Esse comportamento imita vários mecanismos biológicos, como o das plantas carnívoras dioneia e utriculária e de animais como o camarão-pistola e a tamarutaca.
Ao contrário dos atuadores eletromagnéticos convencionais, cujo deslocamento normalmente aumenta gradualmente com a corrente de entrada, o novo sistema apresenta uma resposta não-linear e gradual. Uma vez acionado, o movimento amplificado pode persistir mesmo após a redução da entrada, devido à histerese induzida pela inércia.
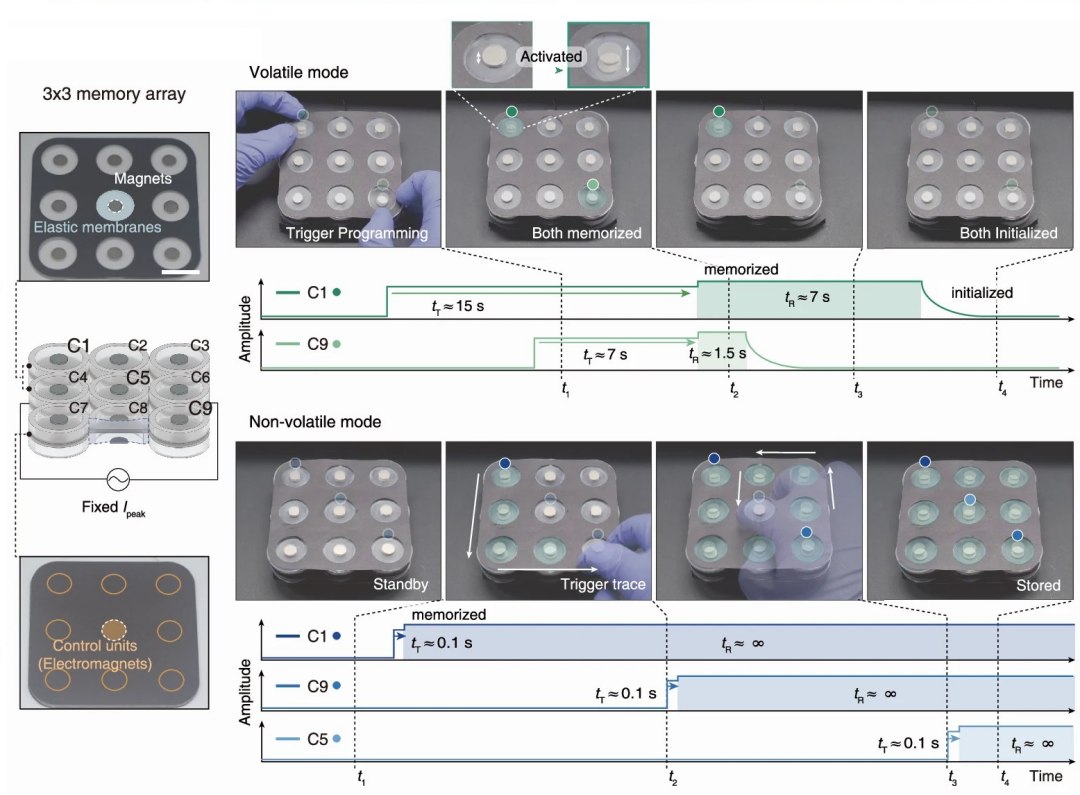
Esse comportamento histerético também possibilita a memória mecânica, na qual estímulos externos, como o toque ou um ímã próximo, alternam o atuador de um estado de espera para um estado memorizado. Dependendo da condição de entrada, a memória pode ser volátil ou não-volátil.
Isto é curioso porque representa uma estratégia na qual a instabilidade mecânica e a inércia são tratadas como elementos funcionais do projeto, em vez de serem efeitos colaterais indesejáveis.
[Imagem: Seong-Yu Choi et al. - 10.1038/s41467-025-68225-y]
Aplicações
Como o mecanismo do atuador elastomagnético se baseia no equilíbrio de forças, e não em um material ou geometria específica, ele pode ser estendido a diversos sistemas robóticos flexíveis e sistemas mecânicos adaptativos, produzindo respostas amplas e discretas sem depender exclusivamente de uma entrada elétrica mais forte.
A equipe destaca ainda que sua nova abordagem elastomagnética pode ter aplicações em outras áreas muito diferentes. Por ser adequada para aplicações que exigem respostas discretas e energeticamente eficientes a pequenos estímulos com limiares programáveis, os atuadores poderão ser úteis como transistores mecânicos, processadores de sinais de pico, ou neuromórficos, ou como dispositivos com memória integrada.
Artigo: Elasto-magnetic instabilities for amplified actuation and mechanical memory
Autores: Seong-Yu Choi, Ji-Sung Park, Won Jun Song, Maga Kim, Yun Hyeok Lee, Yong Eun Cho, Hakjun Lee, Ho-Young Kim, Jeong-Yun Sun
Revista: Nature Communications
DOI: 10.1038/s41467-025-68225-y





Relógio quântico de pêndulo supera limites de precisão
Bola de futebol com 80 átomos de boro desafia teorias
Para descobrir novas leis da física, IA precisa desaprender teorias atuais
Dessalinização solar não gera salmoura e extrai lítio para baterias
Neurotransístor simula e reforça memória e esquecimento do cérebro
Mini-universos podem surgir dentro de estrelas
Bateria inédita armazena hidrogênio ou eletricidade
Fotossíntese artificial fica autônoma e dispensa baterias
Robô omnidirecional aproxima-se da eficiência máxima possível
Nova técnica de combustão viabiliza motores alimentados por amônia
Robô omnidirecional aproxima-se da eficiência máxima possível
Material artificial guia vibrações por trajetórias predefinidas
Tatus inspiram tecnologia para proteção de máquinas delicadas
Músculo artificial inteligente integra sensibilidade e movimento
Esta bomba bombeia sem motor, sem barulho e sem lubrificante
Material tem rigidez alterada remotamente por ondas sonoras
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.