Robô omnidirecional aproxima-se da eficiência máxima possível
Redação do Site Inovação Tecnológica - 18/06/2026
[Imagem: Jiaxun Liu et al. - 10.1126/scirobotics.aec1725]
Robôs precisam ser bonitos?
Quase sempre associada à beleza, a simetria está presente em toda a natureza, desde a forma bilateral dos vertebrados até a geometria radial das estrelas-do-mar.
Há décadas, os especialistas em robótica tentam copiar essas formas e suas capacidades extraordinárias, tentando criar robôs com corpos que se assemelham a humanos, cães ou insetos.
Os sucessos têm sido limitados, então Jiaxun Liu e colegas da Universidade Duke, nos EUA, resolveram deixar qualquer pretensão de beleza de lado, argumentando que o que realmente importa não é a aparência de um robô, mas sim a uniformidade com que ele consegue se comportar em qualquer dimensão do espaço.
Sob esse novo enfoque, a equipe simulou mais de 1.500 configurações de robôs para chegar a um projeto próximo ao máximo teórico dessa uniformidade.
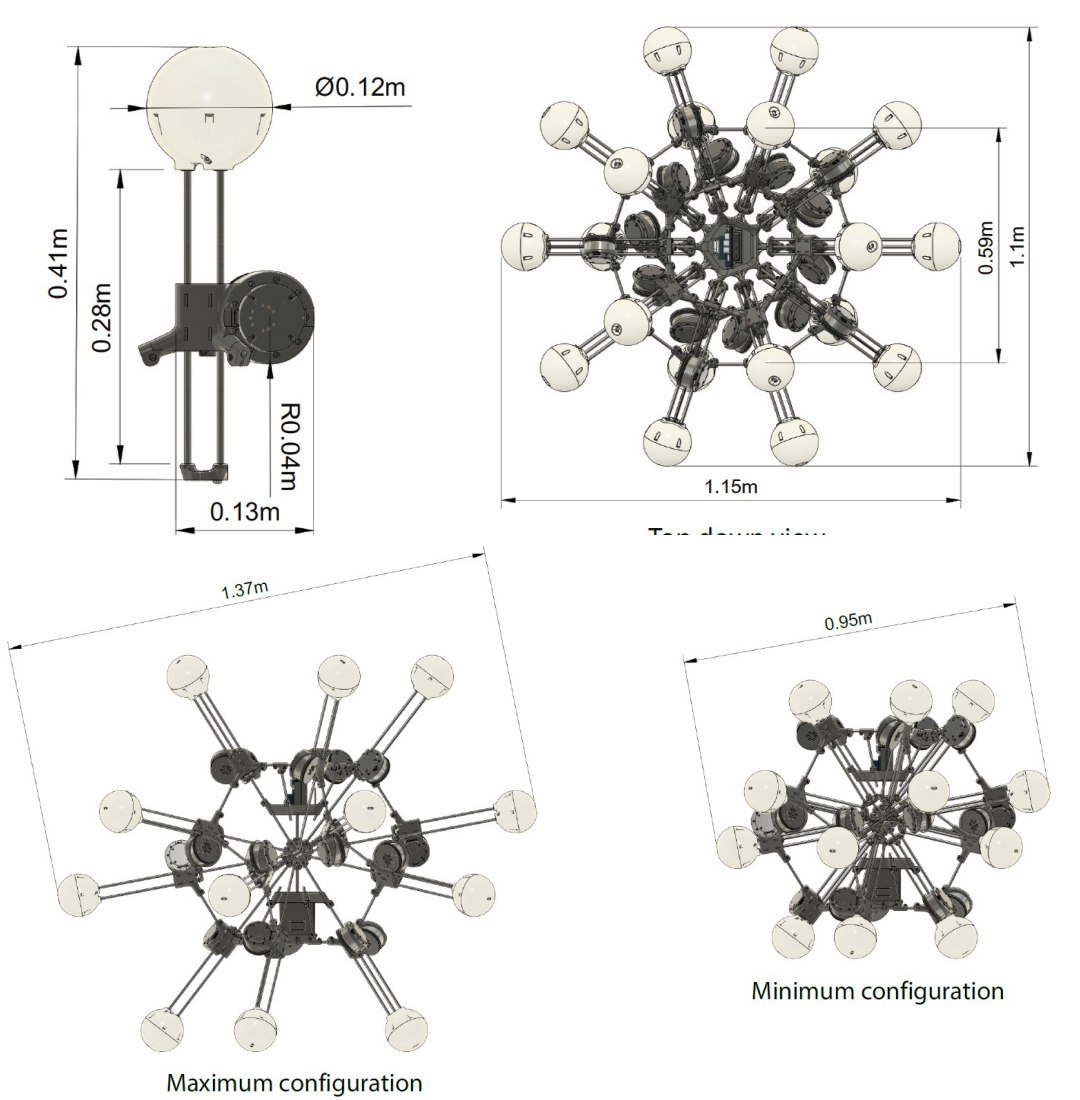
O resultado é feio, ou melhor, o resultado é o Argus, um robô sem frente nem traseira, com 20 pernas modulares e telescópicas irradiando-se de um núcleo central, e cada perna com um "olho" - uma câmera de profundidade. A coisa mais parecida na natureza é um ouriço-do-mar, que não é um frequentador muito assíduo das passarelas, mas pelo menos o projeto provou ser robusto.
"A maioria das pesquisas em robótica tem abordado a simetria como uma questão relacionada ao corpo, mas argumentamos que a simetria mais poderosa reside no nível do que o robô é capaz de fazer," argumenta o professor Boyuan Chen, que outrora se preocupava com a autoimagem corporal dos robôs. "Quando um robô consegue acelerar igualmente bem em todas as direções, ele deixa de precisar estar voltado para o mundo de uma maneira específica. Para frente e para trás se tornam a mesma coisa. Esquerda e direita se tornam a mesma coisa. Todo o problema do controle de robôs muda de natureza."

[Imagem: Jiaxun Liu et al. - 10.1126/scirobotics.aec1725]
Isotropia dinâmica
Para chegar às capacidades únicas do robô-ouriço os pesquisadores desenvolveram um novo princípio de projeto derivado matematicamente, batizado de isotropia dinâmica - um objeto isotrópico é aquele que apresenta as mesmas propriedades físicas em todas as direções.
No caso do robô, um indicador pontua de 0 a 1 com base na uniformidade com que o robô consegue acelerar seu centro de massa em todas as direções, alcançando a isotropia. A maioria dos robôs em uso atualmente, incluindo os quadrúpedes de última geração, humanoides e drones convencionais, pontua abaixo de 0,6; o Argus alcançou 0,91, aproximando-se do máximo teórico.
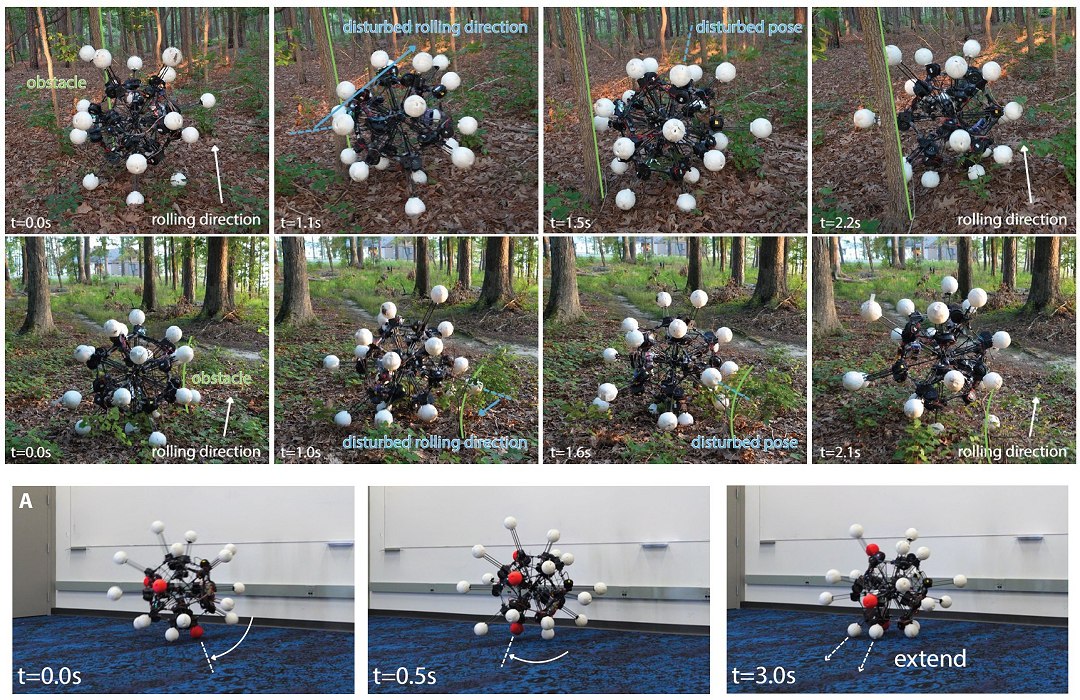
À medida que a simetria dinâmica se aproxima do limite teórico, o desempenho melhora em praticamente todos os aspectos importantes da robótica. Isso inclui rastreamento de trajetória, robustez, eficiência energética, resistência a danos e sucesso em terrenos difíceis. Ou seja, o princípio funciona como um padrão unificado que pode ser aplicado a outras plataformas robóticas.
"Observar o Argus em movimento é diferente de observar qualquer outro robô com o qual já trabalhamos," comentou Liu. "Na primeira vez que o vimos navegar entre árvores e terrenos acidentados, mesmo sob fortes colisões, soubemos que se tratava de algo diferente."
[Imagem: Jiaxun Liu et al. - 10.1126/scirobotics.aec1725]
Prova de existência
Batizado em homenagem ao sentinela onisciente da mitologia grega, o robô Argus combina atuação e percepção em todo o corpo. Cada uma de suas 20 pernas modulares, telescópicas e equipadas com câmeras é disposta nos vértices de um dodecaedro regular, uma forma tridimensional com 12 faces pentagonais.
Essa configuração produz uma distribuição quase perfeitamente uniforme de aceleração instantânea e um campo de visão quase perfeitamente uniforme em todas as direções.
"Argus é uma prova de existência," disse o pesquisador Boxi Xia. "Ele mostra que projetar para simetria dinâmica não é apenas uma curiosidade teórica. Isso produz um robô que você pode implantar em ambientes reais, em terrenos irregulares e com desordem, até mesmo em ambientes de baixa gravidade. Ele muda o que é possível."
Artigo: Extreme Dynamic Symmetry Enables Omnidirectional and Multifunctional Robots
Autores: Jiaxun Liu, Boxi Xia, Boyuan Chen
Revista: Science Robotics
Vol.: 11, Issue 114
DOI: 10.1126/scirobotics.aec1725





Bola de futebol com 80 átomos de boro desafia teorias
Mini-universos podem surgir dentro de estrelas
Detectada pela primeira vez atividade magnética em exoplanetas
Tecnologia pós-binária: Material magnético armazena quatro bits
Capacitor revolucionário usa água para armazenar eletricidade
Para descobrir novas leis da física, IA precisa desaprender teorias atuais
Robô omnidirecional aproxima-se da eficiência máxima possível
Bateria inédita armazena hidrogênio ou eletricidade
Nova técnica de combustão viabiliza motores alimentados por amônia
Dessalinização solar não gera salmoura e extrai lítio para baterias
Tatus inspiram tecnologia para proteção de máquinas delicadas
Sensor de luz para robôs médicos surpreende e irá para indústria e automação
Músculo artificial inteligente integra sensibilidade e movimento
Como criar robôs inteligentes como os da ficção científica?
Internet corporal conecta dispositivos médicos ingeríveis e melhora exames
Materiais inertes aprendem a mudar de forma e se movimentam
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.