Robô ganha percepção visual
Com informações da Cordis - 12/09/2013

[Imagem: Eyeshots]
Robôs e doenças degenerativas
Replicar o comportamento humano em robôs tem sido um objetivo central dos cientistas que trabalham na área.
Um dos principais obstáculos para se atingir esse objetivo é controlar a interação entre o movimento e a visão.
Até agora, os esforços para obter uma percepção espacial precisa e agregá-la a uma coordenação visual-motora têm-se mostrado infrutíferos.
Mas um passo inédito nesse sentido acaba de ser dado por pesquisadores de um projeto financiado pela União Europeia, chamado "Percepção heterogênea 3-D através de fragmentos visuais" - ou Eyeshots, para resumir.
Simulando os mecanismos humanos de aprendizagem, os pesquisadores construíram um protótipo de robô capaz de reconhecer seus arredores e usar a memória para chegar até objetos específicos.
As implicações deste avanço não se limitam a potenciais melhorias na mecatrônica e na robótica - os resultados também vão ajudar a produzir melhores diagnósticos e desenvolver técnicas de reabilitação para doenças degenerativas, como o Mal de Parkinson.
Imagens borradas e consciência visual
O trabalho começou examinando a biologia humana e animal - uma equipe multidisciplinar, envolvendo especialistas em robótica, neurociências, engenharia e psicologia, construiu modelos de computador baseados na coordenação neural de macacos.
A grande sacada desta etapa foi reconhecer que nossos olhos movem-se tão rapidamente que as imagens produzidas são, na verdade, borradas - é o cérebro que junta os fragmentos borrados e gera uma imagem mais coerente do nosso entorno.
De posse dessa informação, os pesquisadores construíram um modelo de computador que combina as imagens visuais com os movimentos dos olhos e dos braços - semelhante ao que ocorre no córtex cerebral do cérebro humano.
[Imagem: Eyeshots]
Outra premissa usada pela equipe foi a de que estar plenamente consciente do espaço visual ao seu redor é algo que só pode ser alcançado explorando ativamente esse espaço.
Segundo esse conceito, a experiência do espaço 3D ao nosso redor é mediada pelos movimentos dos olhos, cabeça e braços, o que nos permite observar, alcançar e pegar objetos.
Se isso é verdade, o sistema motor de um robô deverá ser parte integrante de seu sistema perceptual.
Robô concentrado
E a coisa parece funcionar.
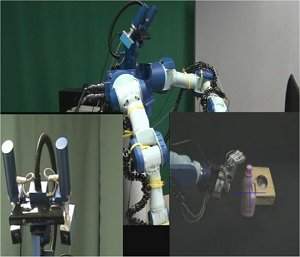
O resultado final do trabalho é um robô humanoide capaz de mover os olhos e se concentrar em um ponto, e até mesmo aprender com a experiência e usar sua memória para alcançar os objetos, sem ter que vê-los primeiro.
Este é um avanço substancial em relação aos resultados preliminares do trabalho, anunciados em 2011, quando os cientistas conseguiram integrar o que o robô via com a atuação de seus braços.
O sistema robótico é composto por um tronco com braços articulados e uma cabeça com olhos móveis.
Agora, os diversos parceiros do projeto planejam usar os avanços obtidos no trabalho - tanto em termos de hardware, quanto de software - em novos projetos, que vão da construção de robôs humanoides mais completos, até o desenvolvimento de sistemas de fisioterapia e auxílio a pessoas com deficiências de mobilidade.






Processador fotônico de 192 dimensões faz computação massivamente paralela
Avanço na computação clássica coloca em xeque conceito de supremacia quântica
Propriedade inusitada do arroz cria material inteligente anti-impacto
Cristais de espaço-tempo podem criar buracos negros microscópicos
Matemáticos provam que energia escura é um erro de interpretação
Luz funciona como freio, imitando um atrito físico
Reator solar recicla plástico e produz hidrogênio limpo
Luz faz metais vibrarem 1 trilhão de vezes por segundo
Suas telas vão ver você graças a um novo tipo de píxel
Computação quântica hiperdimensional é 500 vezes mais rápida
Sensor de luz para robôs médicos surpreende e irá para indústria e automação
Como criar robôs inteligentes como os da ficção científica?
Robôs ganham tato quase humano imitando a visão
Mochila com tecnologia aeroespacial devolve equilíbrio a pacientes
Robô inspirado em semente voa 26 minutos com uma asa só
IA ganha corpo: Robôs crescem usando canibalismo robótico
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.