Robô submarino usa esteiras para inspecionar navios
Com informações da Agência Fapesp - 17/08/2015

[Imagem: UFABC/Divulgação]
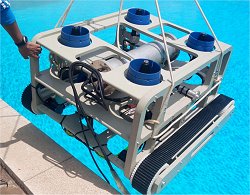
Robô para inspeção de navios
Engenheiros e estudantes da Universidade Federal do ABC (UFABC), em São Paulo criaram um veículo robótico submarino projetado para inspeção de cascos de navios.
Um protótipo do veículo - com propulsores e esteiras motorizadas, flutuadores e sensores - já foi testado com sucesso em uma piscina de mergulho e no tanque de provas do Departamento de Engenharia Naval da Universidade de São Paulo (USP).
O protótipo respondeu adequadamente aos comandos remotos dos operadores nos modos de "voo livre" e "rastejo".
"Agora, na segunda fase da pesquisa, queremos levá-lo a Santos, para testar sua locomoção e o sistema de aderência sobre o casco de um navio em alto-mar", disse o professor Juan Pablo Avila, coordenador da equipe.
Veículo submarino híbrido
O grande diferencial do veículo submarino em comparação com outros similares é que, além de fazer a inspeção visual do casco, com o emprego de câmeras, ele também pode se deslocar sobre o casco por meio de esteiras.
Nesse modo de operação pode ser utilizado um equipamento de ultrassom, capaz de detectar eventuais fissuras ou falhas estruturais e verificar se a espessura do casco está dentro dos limites de tolerância.
[Imagem: UFABC/Divulgação]
A funcionalidade adicional faz do veículo um HROV (Hybrid Remotely Operated Vehicle) e não simplesmente um ROV (Remotely Operated Vehicle), como similares mais simples.
Montado em uma estrutura de polipropileno, o veículo funciona com energia elétrica, provida por uma fonte externa e transmitida por meio de um cabo umbilical, o que lhe dá potência suficiente para operar em condições reais de trânsito dos navios. "Com sua robustez estrutural e controle automático de aderência baseado na medição da pressão de contato, é capaz de operar em ambiente offshore," afirmou Avila.
Aderência mecânica
A aderência do robô submarino ao navio é obtida por meios puramente mecânicos, com o uso de quatro propulsores dispostos verticalmente. Girando em um sentido, as hélices dos propulsores o pressionam contra o casco; girando em sentido contrário, fazem com que se afaste. Desse modo, foram evitadas rodas magnéticas, que limitariam sua operação apenas a cascos de aço e também o tornariam muito pesado e difícil de manobrar.
"Trata-se de um veículo robótico híbrido que combina dois modos de operação. O primeiro é o do 'voo livre', no qual, propulsionado por hélices, ele se movimenta debaixo d'água, dirigindo-se à região de interesse. Uma vez perto do navio, o veículo posiciona-se de forma que sua base fique em contato com o casco. Então, entra em funcionamento o segundo modo de operação, que é o de 'rastejo', no qual ele usa esteiras motorizadas para se deslocar", detalhou o pesquisador.




Tatus inspiram tecnologia para proteção de máquinas delicadas
Propulsor híbrido químico-iônico acelera e barateia pequenos satélites
Transferência de calor é amplificada por material artificial
Para descobrir novas leis da física, IA precisa desaprender teorias atuais
Mágnons: Quasipartícula abre caminho para miniaturizar computadores quânticos
Computador probabilístico é fabricado com tecnologia de silício
Tecnologia pós-binária: Material magnético armazena quatro bits
Detectada pela primeira vez atividade magnética em exoplanetas
Capacitor revolucionário usa água para armazenar eletricidade
Além dos fótons: Quasipartícula faz computação inteiramente com luz
Tatus inspiram tecnologia para proteção de máquinas delicadas
Sensor de luz para robôs médicos surpreende e irá para indústria e automação
Músculo artificial inteligente integra sensibilidade e movimento
Como criar robôs inteligentes como os da ficção científica?
Internet corporal conecta dispositivos médicos ingeríveis e melhora exames
Materiais inertes aprendem a mudar de forma e se movimentam
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.