Tentáculos robóticos flexíveis podem usar força ou delicadeza
Redação do Site Inovação Tecnológica - 22/04/2013
[Imagem: Martinez et al./Adv.Materials]
Garras robóticas
Enquanto as mãos robóticas eficientes e baratas não chegam, pesquisadores têm mostrado que dá para obter destreza e flexibilidade sem nem mesmo precisar de dedos.
Em 2010, uma mão robótica feita com bexiga e café moído mostrou que é possível construir garras mecânicas usando materiais inusitados e muita criatividade.
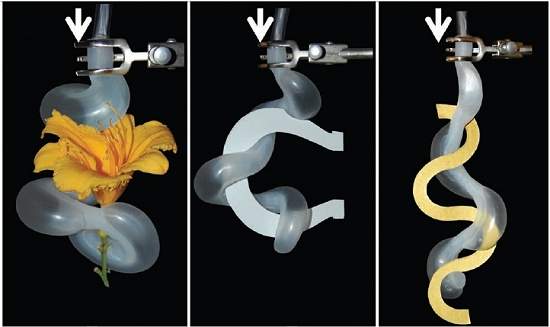
Agora, Ramses Martinez e seus colegas da Universidade de Harvard, nos Estados Unidos, aderiram à onda das bexigas, criando garras robóticas que se contorcem para pegar objetos dos mais variados tipos: de uma flor a uma pesada ferramenta.
A mesma equipe já havia criado uma mão robótica flexível, mas a nova abordagem é ela mesma muito mais flexível, verdadeiros músculos artificiais pneumáticos.
Não era para ser diferente: os pesquisadores afirmam ter-se inspirado nas trombas dos elefantes e nos tentáculos dos polvos.
Tentáculos robóticos
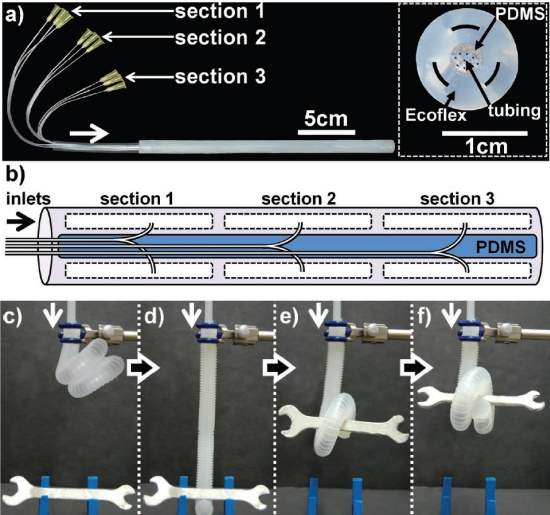
Os robôs são formados por "tentáculos", que podem ser projetados de acordo com o uso do robô.
Cada tentáculo contém três canais de ar independentes - o movimento é obtido bombeando ar-comprimido de forma seletiva para cada um desses canais.
Para obter formatos específicos, de forma a pegar objetos com mais firmeza ou, ao contrário, sem quase tocar no objeto, os canais são segmentados - de acordo com a seção que recebe o ar, pode-se fazer o tentáculo dobrar-se para qualquer lado.
[Imagem: Martinez et al./Adv.Materials]
Segundo o professor George Whitesides, coordenador do estudo, robôs flexíveis podem ser adequados para capturar objetos frágeis em locais confinados, onde é difícil chegar com uma garra robótica tradicional.
"Robôs pneumáticos moles feitos com elastômeros flexíveis podem distribuir a pressão uniformemente sobre áreas amplas, sem controles elaborados. Esta capacidade torna possível para eles manipular objetos frágeis e irregulares," escrevem os pesquisadores.
Artigo: Robotic Tentacles with Three-Dimensional Mobility Based on Flexible Elastomers
Autores: Ramses V. Martinez, Jamie L. Branch, Carina R. Fish, Lihua Jin, Robert F. Shepherd, Rui M. D. Nunes, Zhigang Suo, George M. Whitesides
Revista: Advanced Materials
Vol.: 25, Issue 2, pages 205-212
DOI: 10.1002/adma.201203002






Tatus inspiram tecnologia para proteção de máquinas delicadas
Propulsor híbrido químico-iônico acelera e barateia pequenos satélites
Transferência de calor é amplificada por material artificial
Para descobrir novas leis da física, IA precisa desaprender teorias atuais
Mágnons: Quasipartícula abre caminho para miniaturizar computadores quânticos
Computador probabilístico é fabricado com tecnologia de silício
Tecnologia pós-binária: Material magnético armazena quatro bits
Detectada pela primeira vez atividade magnética em exoplanetas
Capacitor revolucionário usa água para armazenar eletricidade
Além dos fótons: Quasipartícula faz computação inteiramente com luz
Tatus inspiram tecnologia para proteção de máquinas delicadas
Sensor de luz para robôs médicos surpreende e irá para indústria e automação
Músculo artificial inteligente integra sensibilidade e movimento
Como criar robôs inteligentes como os da ficção científica?
Internet corporal conecta dispositivos médicos ingeríveis e melhora exames
Materiais inertes aprendem a mudar de forma e se movimentam
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.