Microrrobôs do futuro serão macios e vão nadar, não andar
Redação do Site Inovação Tecnológica - 02/01/2014
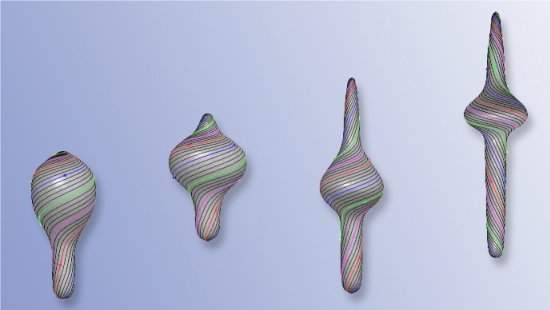
[Imagem: SISSA]
Robôs macios
Esqueça as engrenagens, pistões e alavancas: os robôs miniaturizados do futuro serão "macios".
A ideia não é nova, e existem diversos projetos de robôs macios, principalmente inspirados em animais.
"Quando eu imagino os robôs do futuro, o que me vem à mente são os tentáculos de um polvo ou a tromba de um elefante, em vez do braço mecânico de um guindaste ou o funcionamento interno de um relógio. E se eu pensar em microrrobôs, então eu penso em organismos unicelulares se movimentando na água. Os robôs do futuro serão cada vez mais parecidos como organismos biológicos," concorda o professor Antonio De Simone, da Escola Internacional de Estudos Avançados (SISSA), na Itália.
Para construir seus robôs no futuro, De Simone e seu colega Marino Arroyo (Universidade Politécnica da Catalunha), estão estudando o movimento dos euglenoides - ou englenófitas (Euglenoidea) -, animais aquáticos unicelulares.
Eles pretendem transferir o que estão aprendendo com os euglenoides para a microrrobótica.
Microrrobôs podem realizar uma série de funções importantes, mas as mais famosas delas estão no campo da saúde humana, levando medicamentos diretamente para onde são necessários, reabrindo vasos sanguíneos entupidos ou ajudando a fechar ferimentos.
"Imagine tentar miniaturizar um dispositivo feito de alavancas e engrenagens: você não pode ir abaixo de um certo tamanho mínimo. Em vez disso, imitando os sistemas biológicos, podemos percorrer todo o caminho até o tamanho de uma célula, e esta é exatamente a direção que as pesquisas estão tomando. Nós, em particular, estamos trabalhando no movimento, estudando como se movem certos organismos unicelulares com uma locomoção altamente eficiente," acrescentou De Simone.
De Simone e Arroyo já conseguiram simular em computador espécies de euglenoides com diferentes formas e métodos de locomoção, com base principalmente na deformação do corpo e no inchaço de partes do corpo.
Com essa descrição detalhada dos mecanismos e características dos movimentos, eles acreditam estar prontos para começar a partir para a prática.
"Nosso trabalho não apenas ajuda a compreender o mecanismo de movimento desses organismos unicelulares, mas oferece uma base de conhecimento para planejar o sistema de locomoção dos futuros microrrobôs," concluiu o pesquisador.
De fato, um sistema flexível baseado na deformação e "inchaço" de corpos flexíveis recentemente se mostrou eficiente para a construção de um braço robótico que imita os tentáculos dos animais - embora ainda não esteja miniaturizado:
Artigo: Shape control of active surfaces inspired by the movement of euglenids.
Autores: Marino Arroyo, Antonio DeSimone
Revista: Journal of the Mechanics and Physics of Solids
Vol.: 62: 99
DOI: 10.1016/j.jmps.2013.09.017





Avanço na computação clássica coloca em xeque conceito de supremacia quântica
Processador fotônico de 192 dimensões faz computação massivamente paralela
Propriedade inusitada do arroz cria material inteligente anti-impacto
Cristais de espaço-tempo podem criar buracos negros microscópicos
Matemáticos provam que energia escura é um erro de interpretação
Luz funciona como freio, imitando um atrito físico
Reator solar recicla plástico e produz hidrogênio limpo
Luz faz metais vibrarem 1 trilhão de vezes por segundo
Suas telas vão ver você graças a um novo tipo de píxel
Computação quântica hiperdimensional é 500 vezes mais rápida
Nanorrobô imita foguete espacial, com módulos de propulsão e carga reutilizáveis
Músculo artificial amplifica movimento e memoriza toque
Filme plástico com nanotecnologia destrói vírus por contato
Luz manipula a matéria de maneiras inesperadas
Micro e nanofabricação 3D de última geração agora de qualquer material
Descoberta nova forma de atrito que contradiz lei da física de 300 anos
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.