Pele robótica é construída célula por célula
Redação do Site Inovação Tecnológica - 30/06/2011
[Imagem: Andreas Heddergott/TU München]
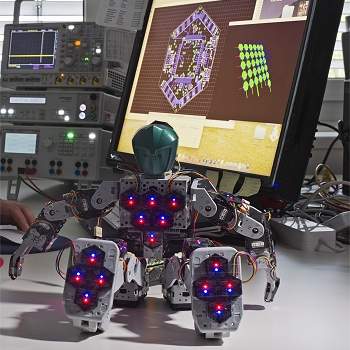
Um pesquisador alemão apresentou as primeiras "células" de um novo conceito de pele artificial para robôs.
O objetivo é fornecer informações táteis para um robô e, assim, completar a sua "percepção", sobretudo a sua visão artificial, suprida pelos "olhos" das câmeras.
Tal como acontece com a pele humana, quando tocada, a pele artificial poderá, por exemplo, simular um ato reflexo do robô, fazendo-o afastar-se, ou gerar um movimento espontâneo, fazendo com que a máquina use seus olhos-câmera para procurar e identificar a fonte de contato.
Esse tipo de comportamento é especialmente importante para robôs assistentes, ajudantes robóticos de pessoas idosas ou mesmo de robôs exploradores, ajudando a reconhecer novos ambientes.
Células artificiais
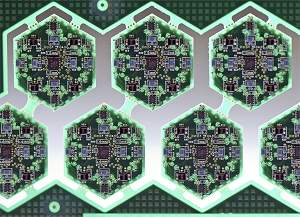
A peça central da nova pele robótica é uma placa hexagonal de circuito impresso de 5 centímetros quadrados, que faz as vezes de uma célula da pele artificial.
Para simular o sentido do tato, cada placa contém quatro sensores infravermelhos, que detectam qualquer coisa que se aproxime a menos do que 1 centímetro.
[Imagem: Andreas Heddergott/TU München]
"Nós, portanto, simulamos o toque", explica Philip Mittendorfer, da Universidade Técnica de Munique. "Isso corresponde a um toque suave nos pêlos em nossa pele."
Há também seis sensores de temperatura e um acelerômetro em cada placa hexagonal.
Isso permite que a máquina registre com precisão o movimento dos seus membros individuais, por exemplo, de seus braços e, assim, saiba quais partes do seu próprio corpo acabaram de se mover - úteis quando os membros robóticos são movidos por um impacto ou por uma ação externa.
"Nós tentamos integrar várias modalidades sensoriais diferentes no menor espaço possível," explica o engenheiro. "Além disso, é fácil expandir as placas de circuito para incluir outros sensores, por exemplo, sensores de pressão."
Pele robótica
A ideia é miniaturizar as placas, que poderão então ser colocadas lado a lado, formando uma pele com uma estrutura em formato de favo de mel.

[Imagem: Andreas Heddergott/TU München]
Os sinais de cada uma das células dessa pele robótica serão enviados para o computador central do robô, que fará as vezes do seu cérebro, por meio das células adjacentes.
Isso permitirá que os sinais viajem por rotas alternativas se alguma conexão falhar.
Por enquanto, está pronto apenas um pequeno pedaço da pele robótica. Estes 15 sensores, no entanto, pelo menos um em cada segmento de um braço robótico, já mostram que o princípio funciona.
Apenas um tapinha leve é suficiente para fazer o braço robótico reagir.
O próximo passo é cobrir inteiramente a superfície do braço robótico com as células sensoriais, formando uma pele artificial completa, dando ao robô uma sensação completa de toque, mesmo no escuro.
Artigo: Humanoid Multimodal Tactile-Sensing Modules
Autores: Mittendorfer, P., Cheng , G.
Revista: IEEE Transactions on Robotics
Data: June 2011
Vol.: 27 Issue:3 pages: 401 - 410
DOI: 10.1109/TRO.2011.2106330





Tatus inspiram tecnologia para proteção de máquinas delicadas
Propulsor híbrido químico-iônico acelera e barateia pequenos satélites
Transferência de calor é amplificada por material artificial
Para descobrir novas leis da física, IA precisa desaprender teorias atuais
Mágnons: Quasipartícula abre caminho para miniaturizar computadores quânticos
Computador probabilístico é fabricado com tecnologia de silício
Tecnologia pós-binária: Material magnético armazena quatro bits
Detectada pela primeira vez atividade magnética em exoplanetas
Capacitor revolucionário usa água para armazenar eletricidade
Além dos fótons: Quasipartícula faz computação inteiramente com luz
Tatus inspiram tecnologia para proteção de máquinas delicadas
Sensor de luz para robôs médicos surpreende e irá para indústria e automação
Músculo artificial inteligente integra sensibilidade e movimento
Como criar robôs inteligentes como os da ficção científica?
Internet corporal conecta dispositivos médicos ingeríveis e melhora exames
Materiais inertes aprendem a mudar de forma e se movimentam
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.