Robô humanoide jogador de futebol tem projeto livre
Redação do Site Inovação Tecnológica - 01/11/2012
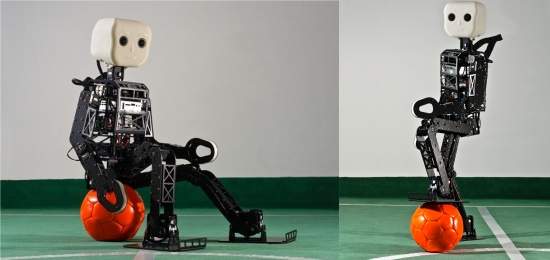
[Imagem: Felix Oprean/Uni Bonn]
Plataforma aberta
Cientistas alemães estão colocando gratuitamente na internet todo o projeto de um robô humanoide capaz de jogar futebol.
Tanto o projeto do hardware, para construção do robô propriamente dito, quanto o sistema de inteligência artificial que o controla, foram disponibilizados gratuitamente, em sistema de código e hardware abertos.
Segundo o Prof. Sven Behnke, da Universidade de Bonn, o objetivo da sua equipe é facilitar a entrada de novos adeptos ao campo das pesquisas com robôs humanoides.
Robô jogador de futebol
O robô Nimbro, com 95 centímetros de altura e 6,6 quilogramas, foi projetado desde o início para jogar futebol.
Ele possui 20 atuadores para converter os comandos do computador que o controla em dribles e em atividades mais corriqueiras, como correr e levantar-se, já que é comum que jogadores de futebol caiam.
"Nós nos esforçamos muito para manter o projeto simples, para permitir que outros grupos usem esse robô como base para seu trabalho, possam modificá-lo e melhorá-lo," disse Behnke.
Um dos cuidados foi aumentar o tamanho do robô, que é grande em comparação com similares capazes de jogar futebol.
O projeto torna o robô pronto para competir na classe TeenSize da RoboCup.
"O Nimbro-OP [Nimbro Open Platform] não é adequado para consumidores. Nosso público-alvo consiste em cientistas que queiram programar robôs baseados nesse hardware e nesse software", alerta o pesquisador.
Inteligência futebolística artificial
O projeto de um robô humanoide capaz de jogar futebol está entre os mais complexos desafios que os roboticistas têm enfrentado.
Isto porque as exigências para que um robô jogue futebol são muito grandes.
Ele precisa perceber as condições ambientais por meio de câmeras, monitorar sua própria condição por meio de sensores de aceleração e inclinação, detectar o gol, distinguir entre os adversários e membros da própria equipe e, finalmente, tomar decisões sobre como conduzir a jogada para chegar ao gol.
O robô, obviamente, não está pronto para fazer tudo isso de maneira excelente, e o campo está aberto para que os controles sejam implementados para otimizar sua atuação. E a diferença entre um robô-perna-de-pau e um robô-Messi pode estar tanto no software quanto no hardware.
"Nosso objetivo é parar de reinventar a roda; usando uma plataforma aberta junto com outros pesquisadores, nós queremos encontrar soluções economizando esforços e gastos," resume o Prof. Behnke.
Tanto o hardware quanto o software do Nimbro são open-source. Maiores informações podem ser encontradas no site do projeto, no endereço www.ais.uni-bonn.de/nimbro/OP.







Neurotransístor simula e reforça memória e esquecimento do cérebro
Mini-universos podem surgir dentro de estrelas
Detectada pela primeira vez atividade magnética em exoplanetas
Tecnologia pós-binária: Material magnético armazena quatro bits
Capacitor revolucionário usa água para armazenar eletricidade
Para descobrir novas leis da física, IA precisa desaprender teorias atuais
Dessalinização solar não gera salmoura e extrai lítio para baterias
Bateria inédita armazena hidrogênio ou eletricidade
Nova técnica de combustão viabiliza motores alimentados por amônia
Robô omnidirecional aproxima-se da eficiência máxima possível
Robô omnidirecional aproxima-se da eficiência máxima possível
Tatus inspiram tecnologia para proteção de máquinas delicadas
Sensor de luz para robôs médicos surpreende e irá para indústria e automação
Músculo artificial inteligente integra sensibilidade e movimento
Como criar robôs inteligentes como os da ficção científica?
Internet corporal conecta dispositivos médicos ingeríveis e melhora exames
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.