Uniciclo: Roda robótica pára em pé sozinha
Com informações da New Scientist - 17/06/2011
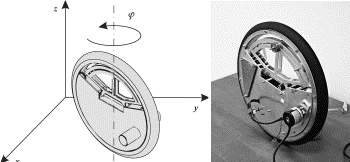
[Imagem: Cieslak et al.]
Robô uniciclo
Pesquisadores poloneses colocaram de pé o ovo de Colombo da robótica.
Patryk Cieslak e seus colegas da Universidade de Ciência e Tecnologia de Cracóvia construíram a primeira roda robótica auto-estabilizada.
O chamado "robô uniciclo" tem sido desenhado em todos os quadrinhos e filmes de ficção científica.
Na prática, porém, nenhuma tentativa tinha logrado êxito até agora.
O desafio está em construir uma roda que consiga parar de pé, sem qualquer tipo de apoio, e se movimentar autonomamente sem cair.
Um robô que se sustente sobre uma roda assim terá uma mobilidade imbatível, capaz de se movimentar em qualquer espaço onde ele consiga entrar.
Todo o robô de Cieslak está acondicionado dentro de uma única roda: seu motor, bateria e controles permanecem estacionários no centro da roda, enquanto um pneu de borracha gira pelo lado de fora.
Roda auto-estabilizada
O equilíbrio da roda robótica é dado por um peso móvel que se desloca para as laterais da roda para alterar o equilíbrio do uniciclo.
Se a roda começa a cair para a direita, por exemplo, três sensores detectarão o movimento: um inclinômetro para detectar a inclinação, mais um acelerômetro e um giroscópio para detectar mudanças de direção.
Os sinais dos três sensores são enviados para um circuito de controle, que move o peso para o outro lado, para funcionar como contrapeso.
Fazendo esses ajustes várias vezes por segundo, o sistema mantém a posição vertical das rodas.
Visão e navegação
"Há muitos usos potenciais para este tipo de robô por causa de seu corpo fino, da construção simples, boa mobilidade e tração, e a eficiência de usar apenas uma roda," diz Cieslak.
Ele contou que o próximo passo é controlar o rolamento do robô, possivelmente usando o mesmo sistema de peso móvel para dar direção ao robô conforme ele se move, antes de equipá-lo com visão e sensores extras que permitirão que ele navegue autonomamente.
Artigo: The mono-wheel robot with dynamic stabilisation
Autores: Patryk Cieslak, Tomasz Buratowski, Tadeusz Uhla, Mariusz Giergiela
Revista: Robotics and Autonomous Systems
Vol.: Available online
DOI: 10.1016/j.robot.2011.05.002





Bola de futebol com 80 átomos de boro desafia teorias
Tecnologia pós-binária: Material magnético armazena quatro bits
Para descobrir novas leis da física, IA precisa desaprender teorias atuais
Mini-universos podem surgir dentro de estrelas
Neurotransístor simula e reforça memória e esquecimento do cérebro
Dessalinização solar não gera salmoura e extrai lítio para baterias
Bateria inédita armazena hidrogênio ou eletricidade
Além dos fótons: Quasipartícula faz computação só com luz
Robô omnidirecional aproxima-se da eficiência máxima possível
Nova técnica de combustão viabiliza motores alimentados por amônia
Robô omnidirecional aproxima-se da eficiência máxima possível
Tatus inspiram tecnologia para proteção de máquinas delicadas
Sensor de luz para robôs médicos surpreende e irá para indústria e automação
Músculo artificial inteligente integra sensibilidade e movimento
Como criar robôs inteligentes como os da ficção científica?
Internet corporal conecta dispositivos médicos ingeríveis e melhora exames
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.