Garra robótica ganha pegada firme e gentil com dedos magnéticos
Redação do Site Inovação Tecnológica - 30/09/2019
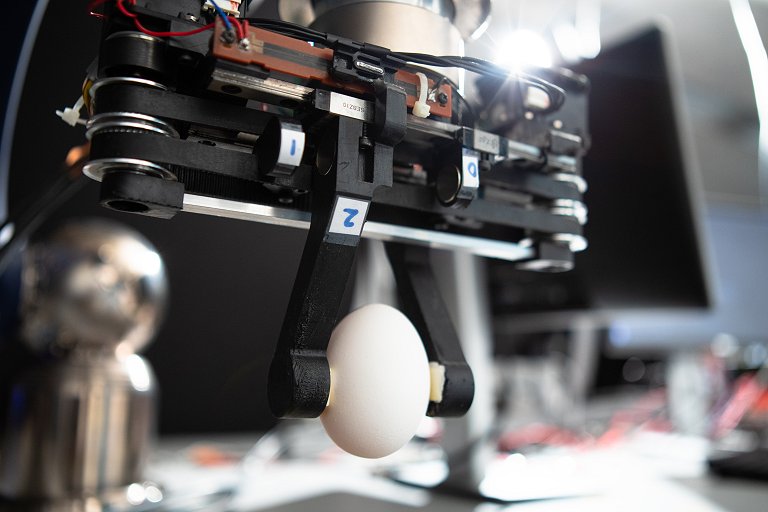
[Imagem: Douglas Levere/Universidade de Buffalo]
Mão robótica com gentileza
As mãos humanas são notavelmente hábeis em manipular uma variedade de objetos. Podemos pegar um ovo ou um morango sem esmagá-los, mas também podemos martelar um prego com toda força.
Uma característica que dá tanta versatilidade às nossas mãos é a capacidade de alterar a firmeza do aperto.
Uma garra robótica, com apenas dois dedos, acaba de demonstrar a capacidade de reproduzir essa característica da mão humana.
O objetivo é melhorar o desempenho dos robôs industriais e a segurança nesses ambientes, onde os robôs trabalham com pessoas.
O projeto da garra robótica concentrou-se na absorção da energia dos impactos durante "colisões" - rápidas e lentas. Isso evita que o robô quebre a peça, quebre a si mesmo por excesso de força, e também torna mais seguro para os operários trabalharem com ou perto das máquinas.
"Nossa garra robótica imita a capacidade da mão humana de ajustar a rigidez da pegada. Essas garras foram projetadas para robôs colaborativos que trabalham em conjunto com as pessoas. Eles serão ajudantes, portanto precisam ser seguros, e as garras de rigidez variável ajudam a atingir esse objetivo," disse Ehsan Esfahani, da Universidade de Buffalo, nos EUA.
Dedos magnéticos
O segredo por trás da versatilidade da garra robótica está nos ímãs que controlam seus dedos.
Em vez de serem fixados no lugar por rolamentos, cada um dos dedos da garra possui uma base magnética que fica entre dois ímãs de neodímio, que repelem ou pressionam o dedo.
O espaço de ar entre os ímãs funciona como uma mola, criando um pequeno alívio quando a mão pega um objeto ou colide com uma força externa. A rigidez da empunhadura também pode ser ajustada aumentando ou diminuindo o espaçamento entre os ímãs.
Em um conjunto de testes, os engenheiros colocaram um pedaço curto de espaguete no comprimento entre os dois dedos da garra. Quando a pinça colidiu com um objeto fixo, o dispositivo detectou a força externa aplicada, o que fez com que os ímãs ajustassem sua posição, reduzindo temporariamente a rigidez da garra e permitindo que ela absorvesse parte da energia da colisão. O resultado final foi um fio de espaguete intacto.
A equipe está lançando uma empresa para comercializar a pinça robótica.
Artigo: A Robot Gripper with Variable Stiffness Actuation for Enhancing Collision Safety.
Autores: Amirhossein H. Memar, Ehsan T. Esfahani
Revista: IEEE Transactions on Industrial Electronics
DOI: 10.1109/TIE.2019.2938475






Transferência de calor é amplificada por material artificial
Bateria inédita armazena hidrogênio ou eletricidade
Dessalinização solar não gera salmoura e extrai lítio para baterias
Computador probabilístico é fabricado com tecnologia de silício
Cola reversível ganha versão elétrica e substitui solda
Para descobrir novas leis da física, IA precisa desaprender teorias atuais
Detectada pela primeira vez atividade magnética em exoplanetas
Tecnologia pós-binária: Material magnético armazena quatro bits
Mini-universos II: O tempo emerge naturalmente, sem relógio externo
Além dos fótons: Quasipartícula faz computação inteiramente com luz
Engenheiros tentam dar adeus à bigorna com nova tecnologia de soldagem
Meta-robôs sem baterias ou motores mudam de forma, movimentam-se e agarram coisas
Folhas magnéticas manipulam objetos sem precisar agarrá-los
Atuador robótico supera capacidades do pulso humano
Robô-caracol inspecionará edifícios e pás de turbinas eólicas
Garra robótica macia de 130g levanta 100kg de carga
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.